2025.09.08 Release
Now Available: Resolver 2025.09.08
We are excited to announce a new release of Resolver!
Resolver 2025.09.08 includes updates to:
- Process Simulate Connector 1.5.0
- Visual Components Connector 1.4.0
- Gemini Connector 1.4.0
- Resolver Cloud
- Resolver Engine
Compatibility information for supported simulation tools and versions can be found on the minimum requirements page of the Resolver documentation site. We recommend always downloading the latest version of the Resolver Connector, regardless of the version of the simulation tool you are using.
Keep reading for what to expect in Resolver 2025.09.08.
All Connectors
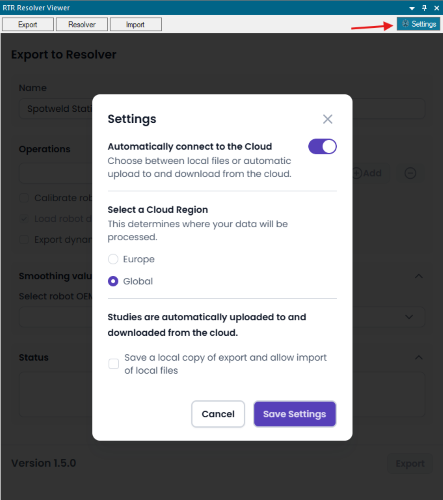
NEW: Settings Dialog
- Selection of exporting files direct to Resolver through integrated browser (default) OR exporting files locally for manual upload to Resolver through web browser
- Selection of Cloud Region
Improvement: Preset names now include the TCP name
- This improvement should make it more obvious which preset to use when setting up robot allocation in the cloud.
Improvement: Automatic version check
- We see you out there exporting projects with an old connector! Now, you will be automatically reminded to update for access to the latest and greatest Resolver features.
Resolver Platform Enhancements
Enhanced support for FANUC robots and improved cycle times
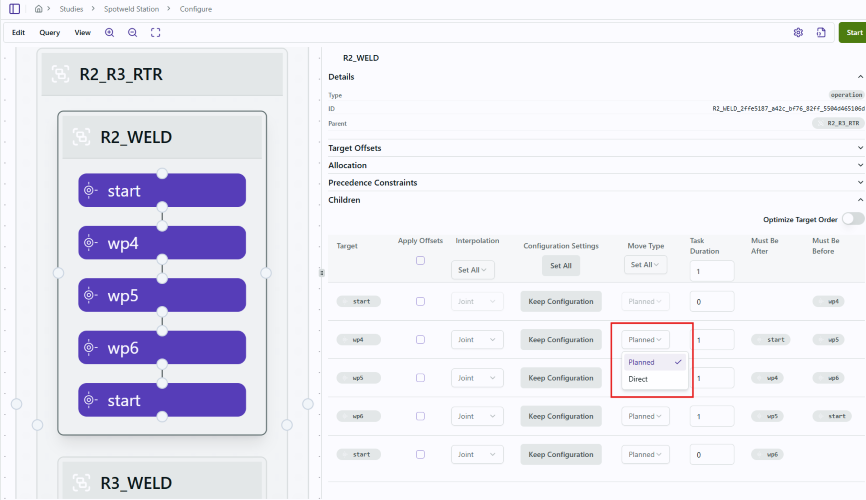
NEW: Support for "Direct" Moves
- "Direct" move types allow users to include robot motions that are simply executed, not planned by Resolver. This keeps cycle times and interlocks accurate to include the fixed parts of your robot motion while allowing Resolver to plan the rest.
- If you want to keep the default behavior of Resolver, there are no changes required. Leave all Targets as "Planned" move type to allow Resolver to plan all the motions for your operation.
Note: It is not recommended to use Direct move types if targets are being re-ordered by the engine (when "Optimize Target Order" is selected).
Improvement: Support for Complex Work Cells
- We are working on the back end of Resolver to improve the optimization of large, complex work cells. In particular, robot allocation queries will see a big enhancement in the ability to solve large problems and produce quality results, faster.
- You will also see:
- Improvements to large numbers of targets (200+)
- Linear rail capabilities for unallocated targets
- Improvement to Optimize Rz reducing robot-robot conflicts
Process Simulate Connector 1.5.0
Added support for Linear Moves
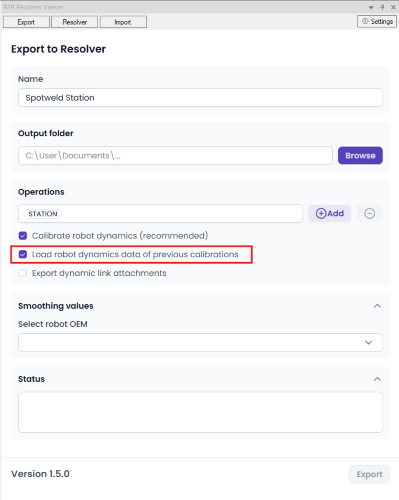
NEW: Calibration Data is Cached
- Yes, dynamic calibration can be slow when using RCS, so we are actively working with RCS vendors and Siemens to improve this. In the meantime, we are introducing an improvement that caches the dynamic data after your first export, so any subsequent exports can reuse the data.
VC and Gemini Connectors 1.4.0
NEW: Added support for Visual Components 4.9
Improvement: Collision Detectors Automatically Exported
- Based on customer feedback, we improved the VC/Gemini experience by including all collision detectors that are on. This prevents unintended behavior, if you forget to enable collision detectors.
- Thank you for providing this feedback!