2025.01.09 Release

Frohes Neues Jahr!
Wir freuen uns auf 2025, das Jahr von Resolver. Wir werden Resolver am 12. Mai 2025 auf der Automate in Detroit offiziell einführen und sind auch auf der Automatica in München am 24. Juni vertreten.
Wir haben unglaublich spannende neue Funktionen und Fähigkeiten für dieses Jahr geplant. Wir haben unsere Roadmap basierend auf Ihrem wertvollen Feedback angepasst.
Vielen Dank, dass Sie mit uns zusammenarbeiten, während wir Resolver schnell, einfach, flexibel und leistungsstark machen.
Resolver Update
Heutiges Update:
- Kurze Umfrage
- Neue Benutzerdokumentation
- Zielreihenfolge-Optimierung
- Zwischenergebnisse herunterladen
- Benutzerdefinierte Linearschienen-Positionen
- PS Connector 0.7.0-beta veröffentlicht
Kurze Umfrage
Es dauert weniger als 3 Minuten
Bitte füllen Sie diese kurze Umfrage aus, um uns zu helfen, unsere Roadmap an Ihre wichtigsten Bedürfnisse anzupassen. Vielen Dank im Voraus!
Neue Benutzerdokumentation
Lesen Sie alles darüber!
Sie können jetzt unter resolver.rtr.ai/docs auf die Resolver-Dokumentation zugreifen.
Wir werden die Dokumentation kontinuierlich aktualisieren, um mit der schnellen Entwicklung des Produkts Schritt zu halten.
Achten Sie auf Videos und andere Best Practices.
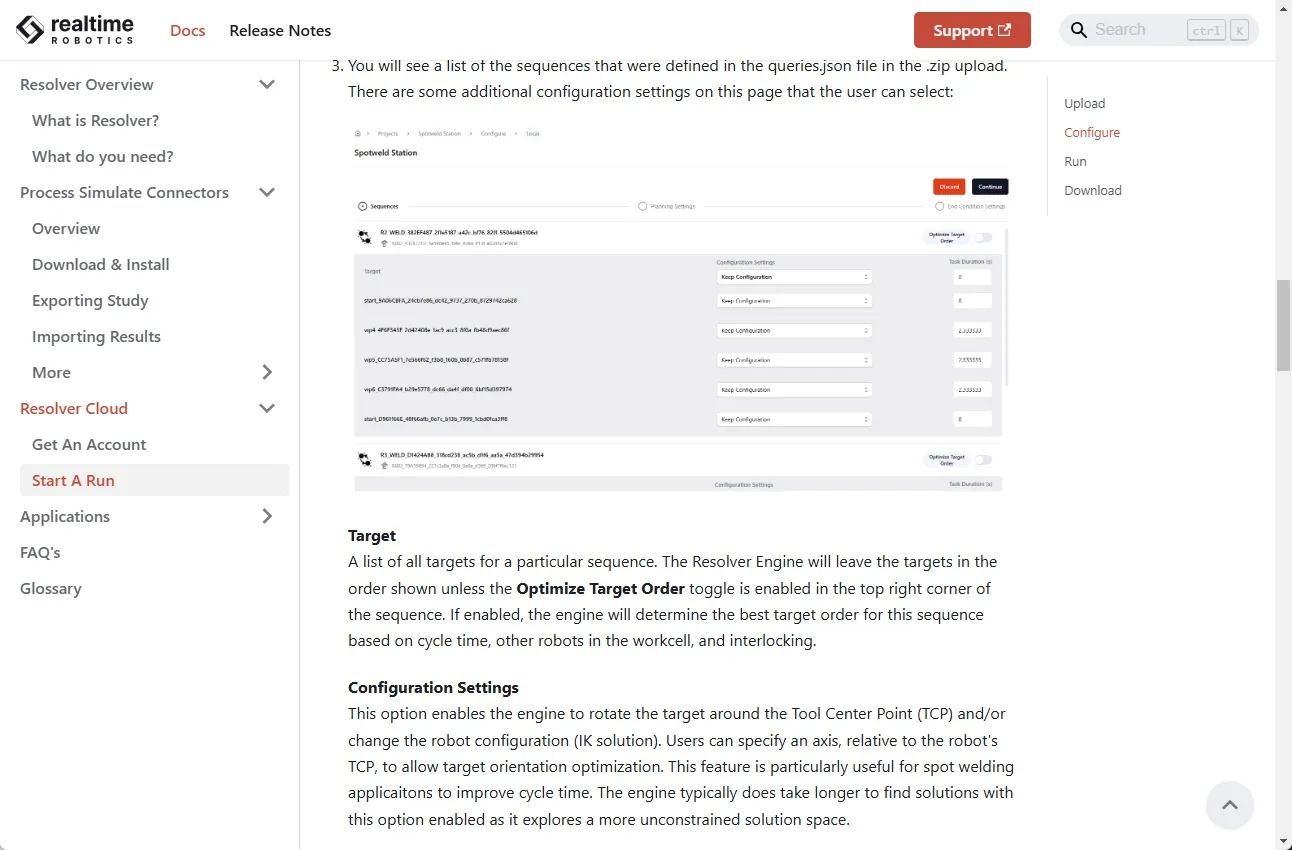
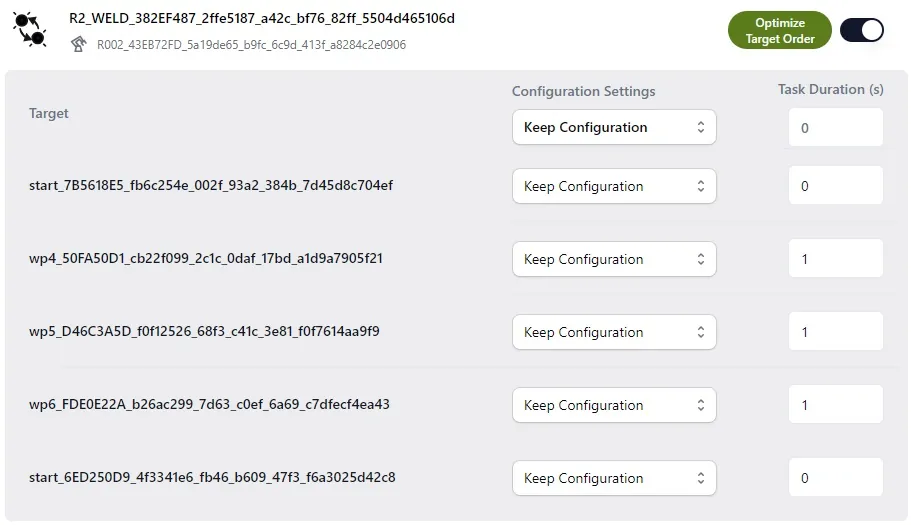
Zielreihenfolge-Optimierung
Finden Sie die optimale Reihenfolge in Minuten
Wenn Ihre Anwendung die Flexibilität bietet, Prozessziele in beliebiger Reihenfolge anzufahren,
können Sie „Zielreihenfolge optimieren" aktivieren, um Bahnen zu generieren, die alle Ziele in der kürzesten Zykluszeit anfahren.
Wenn Sie diese Option deaktiviert lassen, werden die Bahnen so generiert, dass die Ziele in der angegebenen Reihenfolge von oben nach unten angefahren werden.
Nicht sicher, ob es Zeit spart? Probieren Sie es aus und teilen Sie uns die Ergebnisse mit!
Zwischenergebnisse herunterladen
Wie läuft der aktuelle Durchlauf? Jetzt können Sie es herausfinden!
Unser Engineering-Team hat in den letzten Monaten intensiv daran gearbeitet, Ihnen das Herunterladen von Zwischenergebnissen während eines Laufs zu ermöglichen, ohne ihn zu stoppen.
Nachdem Sie einen Lauf gestartet haben, können Sie nun „Aktuelle Ergebnisse abrufen", die in Ihre Simulationssoftware importiert werden können.
Wenn Sie den Lauf beenden und die neuesten Ergebnisse erhalten möchten, wählen Sie „Ergebnisse übernehmen & Stoppen" aus dem Dropdown-Menü.

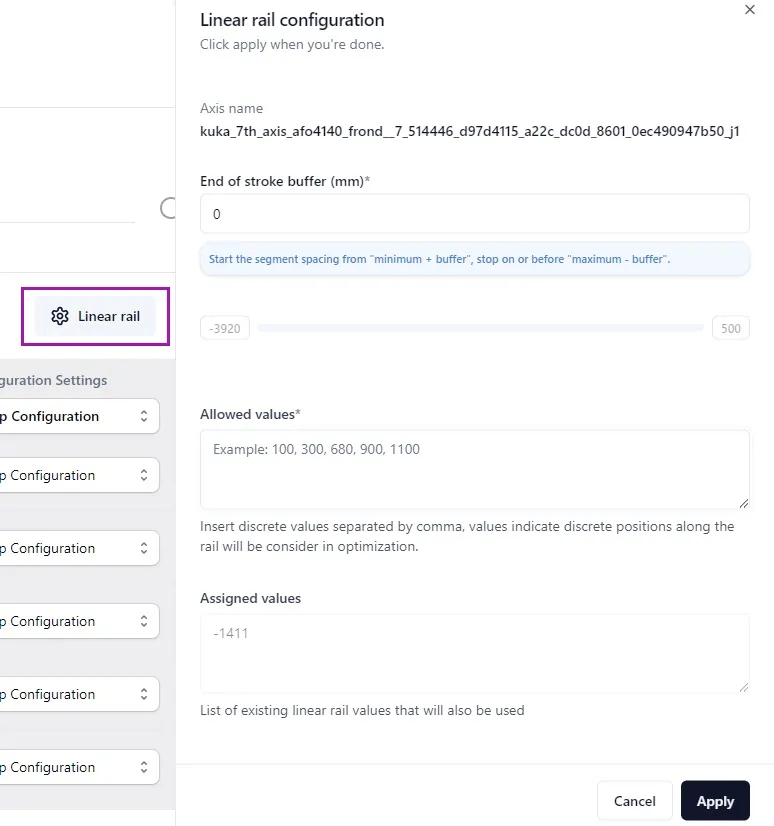
Benutzerdefinierte Linearschienen-Positionen
Mehr Flexibilität für mehr Kontrolle
Für jeden Roboter auf einer externen RTU oder Linearschiene können Sie jetzt Positionen angeben, die Resolver verwendet, um optimale Bewegungspfade und Verriegelungen zu finden.
Sie können auch einen Hub-Puffer für die Minimal- und Maximalwerte hinzufügen.
Bitte beachten Sie: Wenn ein Roboter eine Position oder Konfiguration an einem bestimmten Ziel hat,
wird der externe Achsenwert als eine der Optionen verwendet und in „Zugewiesene Werte" angezeigt.
PS Connector
Version 0.7.0-beta
Laden Sie die neueste Version aus dem Ordner Optimized Path Planning Beta im RTR FileShare herunter.
PS 0.7.0-beta
- Fehlermeldung beim Export hinzugefügt, wenn nicht unterstützte Gerätekinematiken erkannt werden
- Warnmeldung über fehlende Kollisionssätze beim Export hinzugefügt
- Prüfung der Roboterdynamik beim Export hinzugefügt und Benachrichtigung des Benutzers über ungewöhnliche Dynamiken
- Problem behoben, bei dem Pistolentipps in verschachtelter Hierarchie in den Abstandsregeln fehlten
- Problem mit bestimmten Teildarstellungen, die nicht korrekt exportiert wurden, behoben