Release vom 11.03.2025

Resolver Update
Wir freuen uns, ein Upgrade des Resolver PS Connectors vorzustellen — jetzt mit verbesserter Auswahl von Glättungswerten für die Bewegungsgenerierung. Gleichzeitig erkennen wir auf Basis Ihres wertvollen Feedbacks, dass es Bereiche gibt, in denen wir uns verbessern müssen. Im Folgenden teilen wir Ihnen mit, welche Herausforderungen bestehen und was wir dagegen unternehmen.
Heutiges Update:
- Herausforderungen, an denen wir arbeiten
- Roboterhersteller-spezifische Glättung
- PS Connector 0.10.0-beta veröffentlicht
Herausforderungen, an denen wir arbeiten
Die Leistung einiger Funktionen entspricht nicht unserem Standard
Während wir weiterhin innovieren und Ihnen schnell neue Funktionen zur Reduzierung der Engineering-Zeit zur Verfügung stellen,
liefern einige Funktionen und Features nicht den Mehrwert, den Sie erwarten.
Daher möchten wir Sie wissen lassen, dass wir an drastischen Verbesserungen in den folgenden Bereichen arbeiten:
Auto-Tuning beim Import
Problem: Auto-Tuning beim Import mit RCS kann Minuten bis mehrere Stunden dauern.
Was wir tun: Wir beschleunigen den Import-Code, führen schnelle und optimale Tuning-Optionen ein und ermöglichen es dem Benutzer, das Simulationszeitintervall festzulegen. Wir erwarten, dass diese Funktionen in Kürze verfügbar sein werden.
Was das für Sie bedeutet:
- Wenn Sie ohne RCS simulieren, verwenden Sie bitte Auto-Tuning. Es dauert nur wenige Minuten.
- Wenn Sie RCS verwenden, beachten Sie bitte, dass Auto-Tuning mehrere Stunden dauern kann. Kurzfristig ist auch der Import ohne Auto-Tuning mit manuellem Nachbessern von Kollisionen eine Option.
Selbstkollisionen von Robotern
Problem: Wir haben Berichte über Selbstkollisionen von Robotern und Anbauteilen erhalten. Der Grund für dieses Problem ist, dass keine Kollisionsregeln definiert wurden. Beispiele sind 1) Kollisionen zwischen einer Schweißpistole und dem Roboter und
2) Kollisionen zwischen der Schweißpistole und der RTU. Bitte lesen Sie den Abschnitt Collision Rules in der Dokumentation für weitere Informationen.
Was wir tun: Wir prüfen verschiedene Optionen zur Vereinfachung des Workflows und zur Validierung der erwarteten Kollisionssätze.
Was das für Sie bedeutet:
- Stellen Sie sicher, dass Kollisionssätze zwischen Robotergliedern und allen am Roboter befestigten Anbauteilen definiert sind.
Werkzeugkonfiguration in Rx, Ry oder Rz optimieren
Problem: Die Funktion „Rz optimieren" liefert suboptimale Ergebnisse für Punktschweißanwendungen, wenn an den Zielpunkten Kollisionen zwischen Roboter und Teil auftreten. Dies geschieht häufig, weil die Engine derzeit nicht weiß, dass die Pistolenspitzen ignoriert werden können. Es wurde bereits daran gearbeitet, Ignorier-Kollisionsregeln an den Zielpunkten für die Pistolenspitzen zu kodieren, aber es sind noch einige Engine-Arbeiten erforderlich.
Was wir tun: Wir werden diese Funktion in den kommenden Tagen deaktivieren, bis die Pistolenspitzen ordnungsgemäß definiert und in der Engine während der TCP-Orientierungsoptimierung berücksichtigt werden.
Was das für Sie bedeutet:
- Wenn Sie die Möglichkeit haben, die Werkzeugrotation zu optimieren, versuchen Sie den Lauf sowohl mit als auch ohne die Option „Rx, Ry oder Rz optimieren".
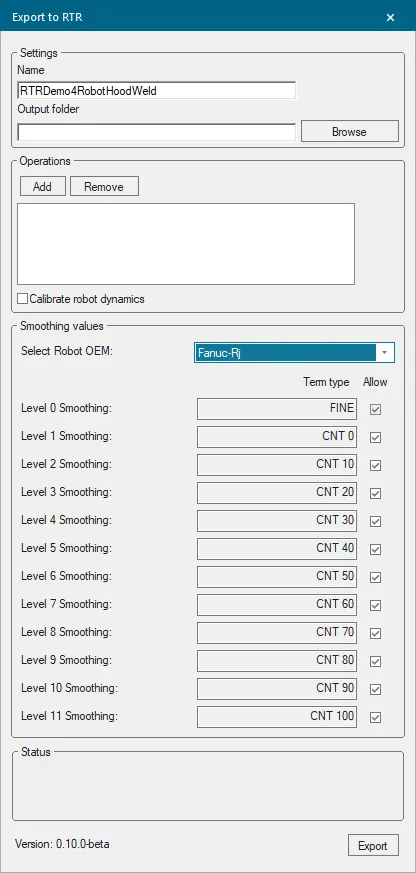
Roboterhersteller-spezifische Glättung
Bisher konnten Benutzer nur 5 (mm) Glättungswerte angeben. Jetzt haben wir die Unterstützung auf alle roboterspezifischen Glättungsoptionen standardmäßig erweitert, was Ihnen mehr Flexibilität und Kontrolle bietet. Deaktivieren Sie einfach die Optionen, die Sie nicht benötigen!
Bitte beachten Sie: Die Option FINE kann nicht abgewählt werden, da sie für das Interlocking an neu generierten Via-Positionen erforderlich ist.
Diese Verbesserung wurde durch Ihr Feedback angestoßen — und wir freuen uns, eine weitere Benutzeranfrage in die Realität umzusetzen. Teilen Sie uns bitte Ihre Meinung mit!
PS Connector
Neue controller-spezifische Glättungswerte
Laden Sie die neueste Version aus dem Ordner Optimized Path Planning Beta im RTR FileShare herunter.
PS 0.10.0-beta
- Roboterhersteller-spezifische Glättungswerte zum Exporter hinzugefügt.
- Protokollierung von Diagnosedaten für Export und Import hinzugefügt.
- Zusätzliche Warnungen für stationäre Werkzeuge, große Gelenkgrenzen usw.
- Fehlerbehebungen bei Interlocks, Zielpositionen und Glättungsumrechnung.