Release vom 28.03.2025

Resolver Update
Im letzten Update haben wir Ihnen einige Herausforderungen mitgeteilt, an denen wir gearbeitet haben. Wir freuen uns, Ihnen mitteilen zu können, dass wir drastische Verbesserungen beim Auto-Tuning der Glättungswerte beim Import erzielt haben. Außerdem freuen wir uns, einen herunterladbaren Erreichbarkeitsbericht zu veröffentlichen, der die Fähigkeit einzelner Roboter beschreibt, zugewiesene Zielpunkte zu erreichen.
Heutiges Update:
- Auto-Tuning beim Import
- Erreichbarkeitsbericht
- PS Connector 0.11.0-beta veröffentlicht
Auto-Tuning beim Import
Glättungs-Auto-Tuning in Minuten!
In unserem vorherigen Release haben wir Leistungseinschränkungen beim Auto-Tuning der Glättungsparameter während des Imports eingeräumt.
Seitdem hat unser Team intensiv daran gearbeitet — und wir freuen uns, die Ergebnisse zu präsentieren.
Mit diesem Release führen wir bedeutende Verbesserungen der API-Effizienz und zwei leistungsstarke neue Import-Modi ein: FAST und OPTIMAL.
FAST-Modus
Sie brauchen Geschwindigkeit? Der FAST-Modus importiert Pfade schnell unter Verwendung von Standard-Konvertierungswerten, die auf Ihren ausgewählten Roboter-OEM zugeschnitten sind. Wenn Schleifkollisionen erkannt werden, passt er intelligent auf eine FINE-Glättungsstufe an. Dieser Modus ist ideal für schnelle Validierungen, wenn Geschwindigkeit Ihre Priorität ist — beachten Sie jedoch, dass bei vielen Kollisionen die Glättung möglicherweise nicht ideal ausfällt.
OPTIMAL-Modus
Sie suchen Präzision? Der OPTIMAL-Modus führt eine eingehende Analyse durch, um den höchstmöglichen Glättungswert für jeden Via-Punkt zu finden — basierend auf Ihren zulässigen Werten — bereitgestellt durch unsere Resolver Engine. Wir haben die API-Interaktionen im Hintergrund grundlegend überarbeitet und die Optimierungszeit erheblich reduziert, während wir die höchste Qualität der Pfadglättung liefern. Die benötigte Zeit skaliert zwar weiterhin mit der Anzahl der Glättungsoptionen pro Via, aber die Ergebnisse sprechen für sich: ultraglatte, OEM-optimierte Pfade.

🎁 Lösung bereitgestellt für Roland und Rico
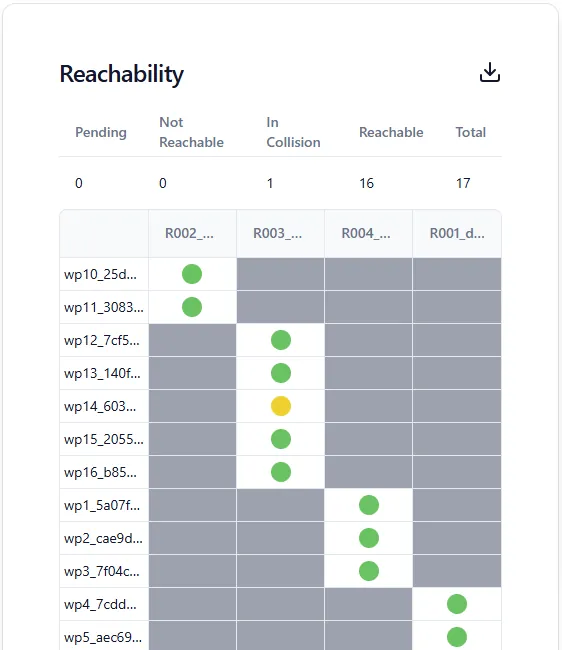
Erreichbarkeitsbericht
Erreichbarkeit aller Zielpunkte schnell prüfen und Bericht herunterladen Das manuelle Anfahren jedes Zielpunkts mit dem Roboter liefert nur begrenzte Erreichbarkeitsinformationen und ist zudem sehr mühsam. Sparen Sie jetzt viel Engineering-Zeit, indem Sie Resolver die Erreichbarkeitsprüfung für Sie durchführen lassen. Resolver prüft, ob Roboter ihre zugewiesenen Zielpunkte erreichen können, indem tatsächliche Bewegungspfade generiert werden. Innerhalb von Minuten werden die Informationen in einer übersichtlichen Tabelle dargestellt, die im CSV-Format heruntergeladen werden kann, um sie in Ihren Planungs- und Engineering-Prozessen weiterzuverwenden.
Die verschiedenen in der Tabelle angezeigten Status sind:
- Ausstehend (Sanduhr): Die Engine berechnet die Erreichbarkeit.
- Nicht erreichbar (rot): Der Zielpunkt ist nicht erreichbar.
- In Kollision (gelb): Der Zielpunkt ist erreichbar, aber nur durch eine Kollision.
- Erreichbar (grün): Der Zielpunkt ist ohne Kollision erreichbar.
🎁 Lösung bereitgestellt für David
PS Connector
Verbesserungen am Auto-Tune
Laden Sie die neueste Version aus dem Ordner Optimized Path Planning Beta im RTR FileShare herunter.
PS 0.11.0-beta
- Auto-Tune-Verbesserungen und Einführung von zwei Modi (Fast- und Optimal-Modus)
- Aktualisierter Installer ermöglicht Installation ohne Administratorrechte, wenn der aktuelle Benutzer ausreichende Rechte hat (vielen Dank an Pawel für den Vorschlag!)
- Unterstützung für SCARA-Roboter hinzugefügt
- Zusätzliche Warnungen für stationäre Werkzeuge, große Gelenkgrenzen usw.
- Fehlerbehebungen für externe Achsen, Fehlermeldungen, Sicherheitsobjekte und mehr.