Version 2025.06.11

Resolver 2025.06.11
Wir bereiten uns auf die Automatica in München vor und würden Sie gerne persönlich treffen. Wir werden unsere Resolver-Demo sowie unsere RapidPlan-Demo in Halle B6, Stand 301 präsentieren. Wir hoffen, Sie dort zu sehen!
Gleichzeitig hat das Team intensiv daran gearbeitet, Ihnen neue Funktionen bereitzustellen, darunter die Unterstützung für Materialhandhabung und Konfiguration optimieren. Bitte denken Sie daran, Ihren PS Connector zu aktualisieren, um alle neuen Funktionen nutzen zu können. Lesen Sie weiter oder besuchen Sie unsere aktualisierte Dokumentation und Tutorials unter resolver.rtr.ai, um mehr zu erfahren.
Im heutigen Resolver 2025.06.11 Release:
- Unterstützung für Materialhandhabung in PS
- Unterstützung für zustandsbehaftete Objekte in PS
- Konfiguration optimieren in PS
- UI-Updates für Resolver
- Aktualisierte Dokumentation und Tutorials
- PS Connector 1.1.1
Unterstützung für Materialhandhabung in PS
Pfadplanung und Verriegelungsgenerierung für Materialhandhabung
Resolver unterstützt jetzt Operationen mit OLP-Befehlen für die Materialhandhabung. Diese neue Funktion ermöglicht es Ihnen, eine gesamte Arbeitszelle mit einer Mischung aus Materialhandhabungs- und Prozessoperationen zu exportieren und hochzuladen.
Unterstützte OLP-Befehle:
- Blank/Display
- Attach/Detach
- Grip/Release
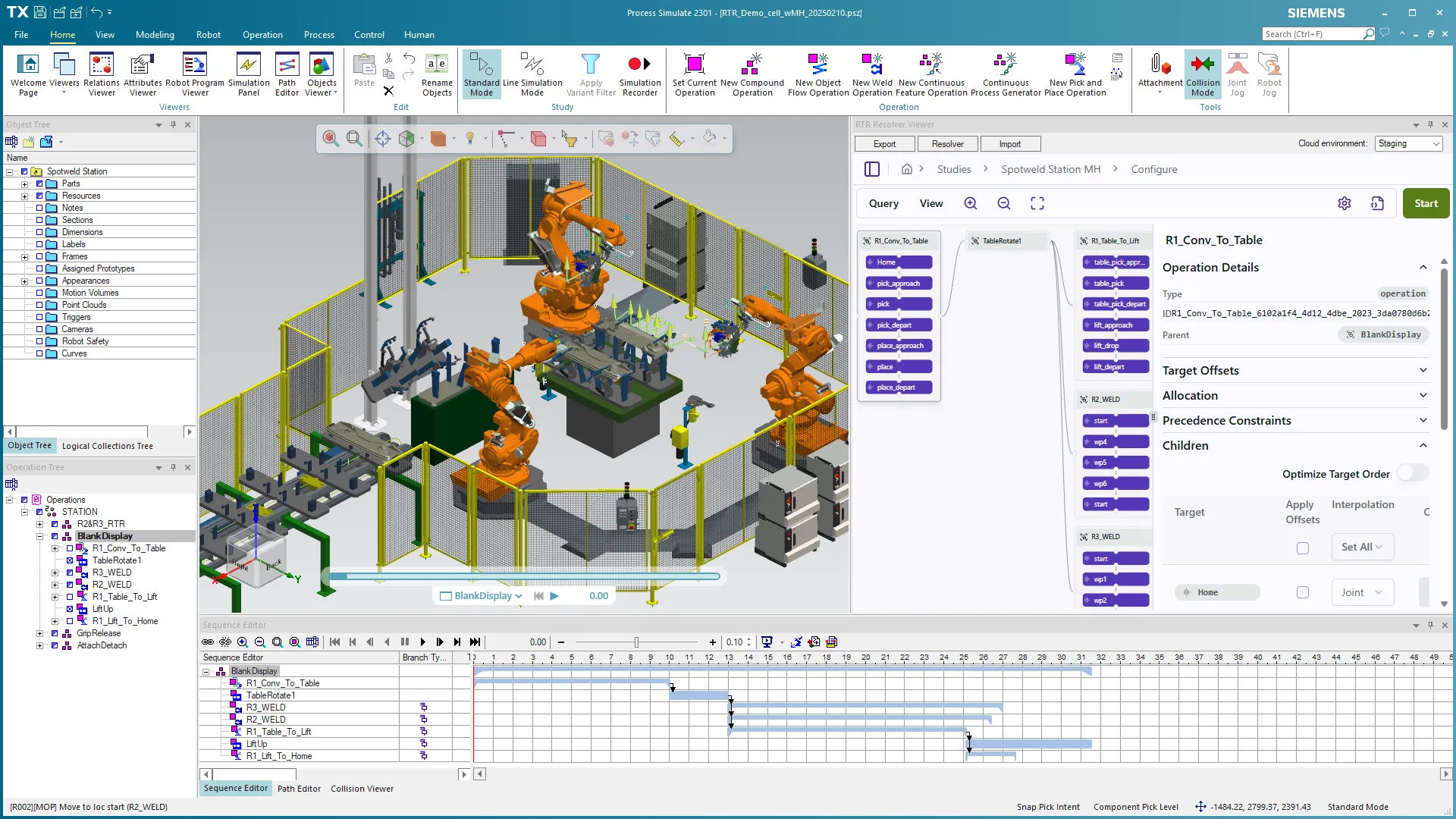
Unterstützung für zustandsbehaftete Objekte in PS
Berücksichtigung von Objekten wie Klemmen, die während Operationen ihren Zustand ändern
Neben der Unterstützung für Materialhandhabung unterstützt Resolver auch Operationen mit OLP-Befehlen, die den Zustand von Objekten ändern. Wenn Sie Klemmen oder Greifer haben, die während einer Operation betätigt werden, berücksichtigt Resolver diese Aktionen und generiert kollisionsfreie Pfade und Verriegelungen.
Unterstützte OLP-Befehle:
- Blank/Display
- DriveDevice
- JumpDevice
- WaitDevice

Konfiguration optimieren in PS
Warum Auto-Teach verwenden, wenn Sie die Konfigurationen optimieren können?
Erhalten Sie automatisch Konfigurationen, die zu optimalen Zykluszeiten für Start-/Endpunkte sowie Prozesspunkte führen.
Start-/Endpunkte – Tool innerhalb der Box optimieren
Für Start- und Endpunkte definieren Sie eine Begrenzungsbox, die festlegt, wo sich das EOAT befinden darf, und Resolver findet Start- und Endkonfigurationen, die die Operation optimieren. Die Begrenzungsbox wird durch zwei Punkte relativ zum TCP des Werkzeugs definiert.

Prozesspunkte – Tool optimieren
Für Prozesspunkte kann Resolver die Roboterkonfiguration je nach Anwendung auf verschiedene Weisen optimieren. Wählen Sie „Konfiguration optimieren", um die Zielposition beizubehalten, aber eine optimale Roboterkonfiguration mit Pfaden zu finden. Wählen Sie „Tool Rx/Ry/Rz optimieren", um Resolver zu erlauben, das Ziel um die angegebene TCP-Achse zu drehen und die optimale Konfiguration und Pfade zu finden.

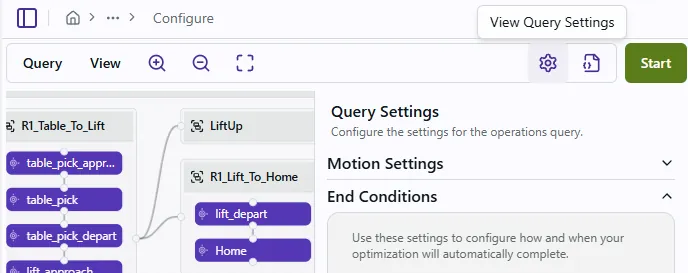
UI-Updates für Resolver
Build-UI wird automatisch ausgewählt und neue Symbolleiste auf der Arbeitsfläche
Wir optimieren die Benutzeroberfläche von Resolver weiterhin, um Ihnen Engineering-Aufwand zu ersparen. Nach dem Export einer Studie wird Ihnen nun automatisch die Build-UI angezeigt. Zusätzlich gibt es eine neue Symbolleiste mit einem Zahnradsymbol zum Einrichten der Abfrageeinstellungen wie „Bewegungseinstellungen" und „Endbedingungen".
Aktualisierte Dokumentation und Tutorials
Neue Tutorial-Videos für den Einstieg
Mit der Veröffentlichung neuer Funktionen aktualisieren wir kontinuierlich unsere Dokumentationsseite. Wir haben kürzlich einen neuen Abschnitt oben hinzugefügt: Tutorials, mit Videos und Schritt-für-Schritt-Anleitungen für den Einstieg.
Neue Seite für unterstützte Funktionen
Für Process Simulate gibt es einen neuen Abschnitt, der die unterstützten Funktionen beschreibt. Er enthält Details darüber, was derzeit von Resolver unterstützt wird und was nicht.
PS Connector 1.1.1
Unterstützung für mehrere OLP-Befehle hinzugefügt
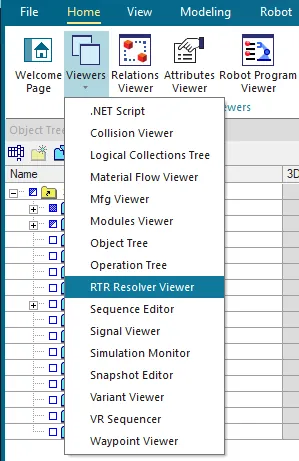
Laden Sie die neueste Version von unserer neuen Downloads-Seite innerhalb von Resolver unter resolver.rtr.ai herunter. Wählen Sie nach der Installation des neuesten PS Connector bitte „RTR Resolver Viewer" aus dem Viewers-Dropdown aus.
Bei der ersten Anmeldung müssen Sie oben rechts im RTR Resolver Viewer je nach Ihrem Standort Ihre Cloud-Umgebung auswählen.
- Europe: Standort in Europa
- Global: Amerika, APAC und alle anderen Länder.

PS 1.1.1
- Unterstützung für Materialhandhabungs-OLP-Befehle hinzugefügt, darunter Blank/Display, Attach/Detach und Grip/Release.
- Unterstützung für Zustandsänderungs-OLP-Befehle hinzugefügt, darunter Blank/Display, DriveDevice, JumpDevice und WaitDevice.
- Unterstützung für Werkzeugwechsel während des Zyklus (Mount/Unmount, Connect/Disconnect) hinzugefügt
- Unterstützung für Sicherheitsabstände zwischen Robotern, die in Kollisionssätzen festgelegt sind, hinzugefügt.
- Formulierung von Warnmeldungen aktualisiert.
- Weitere Verbesserungen und Fehlerbehebungen
Resolver 2025.06.11
| Komponente | Version |
|---|---|
| Engine | 2.11.0-708-g661c3d6d28 |
| Cloud | 4c7d1bbd |
| PS Connector | 1.1.1 |