Release 2025.09.08

Jetzt verfügbar: Resolver 2025.09.08
Wir freuen uns, eine neue Version von Resolver ankündigen zu können!
Resolver 2025.09.08 enthält Aktualisierungen für:
- Process Simulate Connector 1.5.0
- Visual Components Connector 1.4.0
- Gemini Connector 1.4.0
- Resolver Cloud
- Resolver Engine
Kompatibilitätsinformationen für unterstützte Simulationstools und -versionen finden Sie auf der Seite Mindestanforderungen der Resolver-Dokumentationsseite. Wir empfehlen, immer die neueste Version des Resolver Connectors herunterzuladen, unabhängig von der Version des Simulationstools, das Sie verwenden.
Lesen Sie weiter, um zu erfahren, was Sie in Resolver 2025.09.08 erwartet.
Alle Connectors
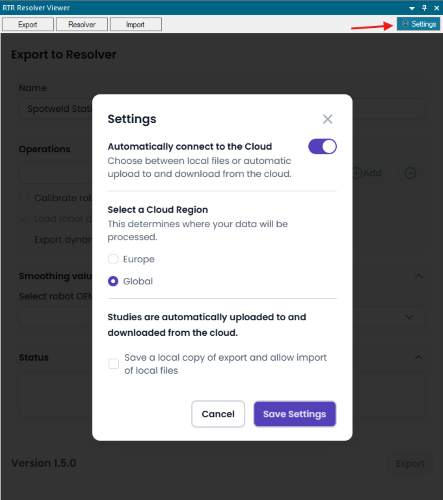
NEU: Einstellungsdialog
- Auswahl zwischen dem direkten Export von Dateien zu Resolver über den integrierten Browser (Standard) ODER dem lokalen Export von Dateien zum manuellen Upload zu Resolver über den Webbrowser
- Auswahl der Cloud-Region
Verbesserung: Preset-Namen enthalten jetzt den TCP-Namen
- Diese Verbesserung macht es deutlicher, welches Preset bei der Einrichtung der Roboterzuweisung in der Cloud zu verwenden ist.
Verbesserung: Automatische Versionsprüfung
- Wir sehen, dass Sie dort draußen Projekte mit einem alten Connector exportieren! Ab sofort werden Sie automatisch daran erinnert, zu aktualisieren, um Zugriff auf die neuesten und besten Resolver-Funktionen zu erhalten.
Verbesserungen der Resolver-Plattform
Erweiterte Unterstützung für FANUC-Roboter und verbesserte Zykluszeiten
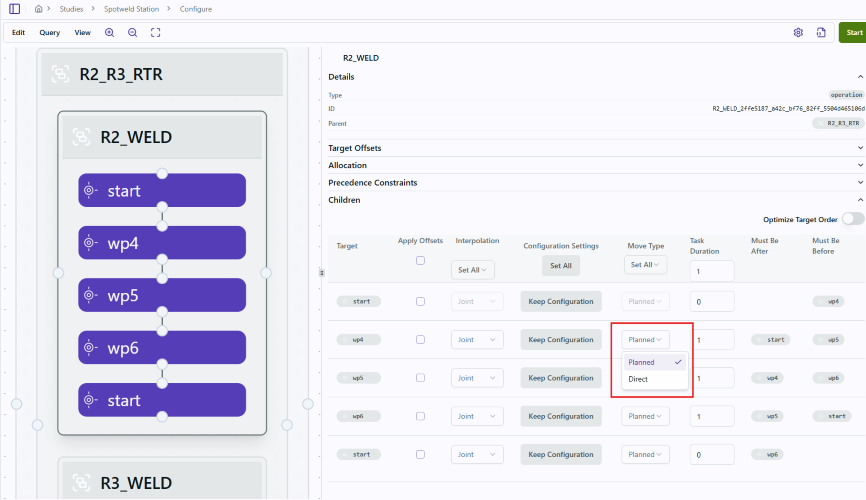
NEU: Unterstützung für "Direct"-Bewegungen
- "Direct"-Bewegungstypen ermöglichen es Benutzern, Roboterbewegungen einzubinden, die einfach ausgeführt und nicht von Resolver geplant werden. Dadurch bleiben Zykluszeiten und Interlocks korrekt, um die festen Teile Ihrer Roboterbewegung einzubeziehen, während Resolver den Rest plant.
- Wenn Sie das Standardverhalten von Resolver beibehalten möchten, sind keine Änderungen erforderlich. Lassen Sie alle Targets als "Planned"-Bewegungstyp, damit Resolver alle Bewegungen für Ihre Operation plant.
Hinweis: Es wird nicht empfohlen, Direct-Bewegungstypen zu verwenden, wenn Targets von der Engine neu angeordnet werden (wenn "Optimize Target Order" ausgewählt ist).
Verbesserung: Unterstützung für komplexe Arbeitszellen
- Wir arbeiten am Backend von Resolver, um die Optimierung großer, komplexer Arbeitszellen zu verbessern. Insbesondere werden Roboterzuweisungsabfragen eine deutliche Verbesserung bei der Lösung großer Probleme und der schnelleren Erzeugung qualitativ hochwertiger Ergebnisse erfahren.
- Außerdem werden Sie Folgendes sehen:
- Verbesserungen bei einer großen Anzahl von Targets (200+)
- Linearschienen-Funktionalitäten für nicht zugewiesene Targets
- Verbesserung von Optimize Rz zur Reduzierung von Roboter-Roboter-Konflikten
Process Simulate Connector 1.5.0
Unterstützung für lineare Bewegungen hinzugefügt
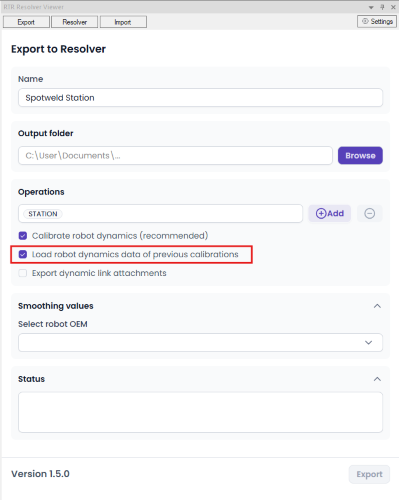
NEU: Kalibrierungsdaten werden zwischengespeichert
- Ja, die dynamische Kalibrierung kann bei Verwendung von RCS langsam sein, daher arbeiten wir aktiv mit RCS-Anbietern und Siemens an einer Verbesserung. In der Zwischenzeit führen wir eine Verbesserung ein, die die dynamischen Daten nach Ihrem ersten Export zwischenspeichert, sodass nachfolgende Exporte die Daten wiederverwenden können.
VC- und Gemini-Connectors 1.4.0
NEU: Unterstützung für Visual Components 4.9 hinzugefügt
Verbesserung: Kollisionsdetektoren werden automatisch exportiert
- Basierend auf Kundenfeedback haben wir das VC/Gemini-Erlebnis verbessert, indem alle aktivierten Kollisionsdetektoren einbezogen werden. Dies verhindert unbeabsichtigtes Verhalten, falls Sie vergessen, Kollisionsdetektoren zu aktivieren.
- Vielen Dank für Ihr Feedback!