Version 2025.11.17

Jetzt verfügbar: Resolver 2025.11.17
Die neueste Version von Resolver ist jetzt verfügbar! Lesen Sie weiter, um mehr über Resolver 2025.11.17 zu erfahren.
Resolver 2025.11.17 wird durch unsere neuesten Connectors unterstützt:
- Process Simulate Connector 1.9.1
- Visual Components Connector 1.9.1
- MELSOFT Gemini Connector 1.9.1
Kompatibilitätsinformationen für unterstützte Simulationswerkzeuge und -versionen finden Sie auf der Seite Mindestanforderungen der Resolver-Dokumentationsseite. Wir empfehlen, immer die neueste Version des Resolver Connectors herunterzuladen, unabhängig von der Version des Simulationswerkzeugs, das Sie verwenden.
Resolver 2025.11.17 ist vollgepackt mit Verbesserungen. Hier sind einige der Highlights:
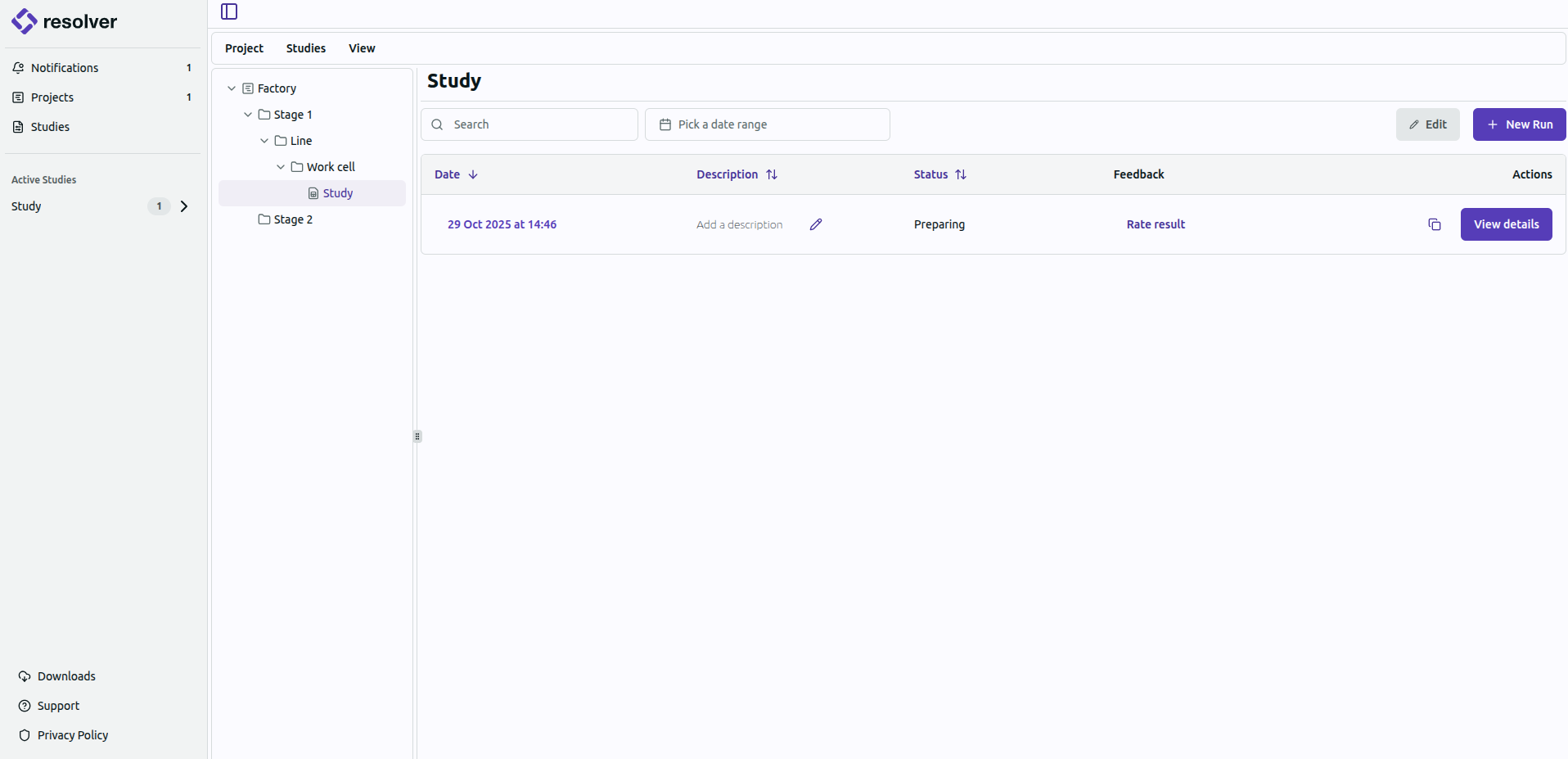
- Einführung einer neuen Ordnerstruktur zur Organisation von Studien in der Plattform-Benutzeroberfläche
- Implementierung einer neuen Anmeldeerfahrung, die es Benutzern ermöglicht, mit ihrem Google- oder Microsoft-Konto auf Resolver zuzugreifen
- Verbesserte Stabilität der Process Simulate Connector-Anmeldung und -Authentifizierung, wodurch der Connector besser mit den IT-Richtlinien von Organisationen übereinstimmt
- Erweiterte Möglichkeit, Arbeitsgrenzen nur auf native Gelenke anzuwenden
Verbesserungen der Resolver-Plattform
Neue Ordnerstruktur und Anmeldeerfahrung
- NEU: Ordnerstruktur zur Organisation von Studien.
- Ihr Arbeitsbereich: Sie sehen nun ein „Default"-Projekt in der linken Seitenleiste, das nur von RTR erstellt und umbenannt werden kann. Dieses enthält Ihre zugewiesenen Roboter pro Durchlauf. Die Roboter pro Durchlauf werden basierend auf der in Ihrem Vertrag mit RTR festgelegten Roboteranzahl zugewiesen.
- Ordner erstellen: Benutzer können jetzt Unterordner innerhalb eines Projekts erstellen, um Studien zu organisieren und hochzuladen. Sie können Studien über einen Connector direkt in einen bestimmten Ordner hochladen. Roboter pro Durchlauf können in jedem Ordner Ihres Projekts verwendet werden. Derzeit können Ordner nur von RTR gelöscht werden.
- Studien ausführen: Es muss eine Anzahl von Robotern pro Durchlauf auf Projektebene vorhanden sein, die in einem Vertrag definiert ist, um eine benutzerdefinierte Studie in Resolver hochzuladen. Benutzer ohne Vertrag können Resolver weiterhin mit der RTR Demo Cell nutzen. RTR erstellt ein „Demo"-Projekt für alle aktiven Kunden ohne Zahlungsvertrag, um die RTR Demo Cell-Studie laden zu können.
- Wichtiger Hinweis: Sie benötigen einen Projektordner in Ihrer Umgebung, um Studien hochzuladen, und Sie müssen zahlender Kunde sein, um Durchläufe mit eigenen Studien auszuführen. Wenn Sie kein Projekt in Ihrer Umgebung haben oder Ihre eigene Zelle über Resolver ausführen möchten, wenden Sie sich an Ihren Kundenbetreuer.
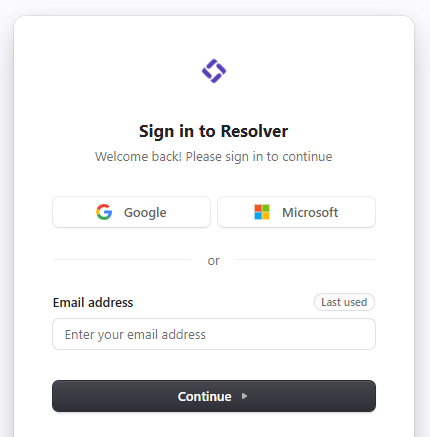
- NEU: Aktualisierte Anmeldeerfahrung mit Option für Single Sign-On (SSO) über Google und Microsoft
- Wenn Sie das nächste Mal zur Anmeldung bei Resolver aufgefordert werden, sehen Sie eine neue Anmeldeerfahrung, die die Option beinhaltet, sich über Google oder Microsoft anzumelden.
- Neue Benutzer können jetzt mit ihren bestehenden Google- oder Microsoft-Konten zu Resolver hinzugefügt werden.
- Was bedeutet das? Sie sollten sich weiterhin mit Ihrer ursprünglichen E-Mail-Adresse und Ihrem Passwort anmelden können, aber Benutzer können sich jetzt auch über SSO mit ihren Google- oder Microsoft-Kontoinformationen bei Resolver anmelden.
Alle Connectors
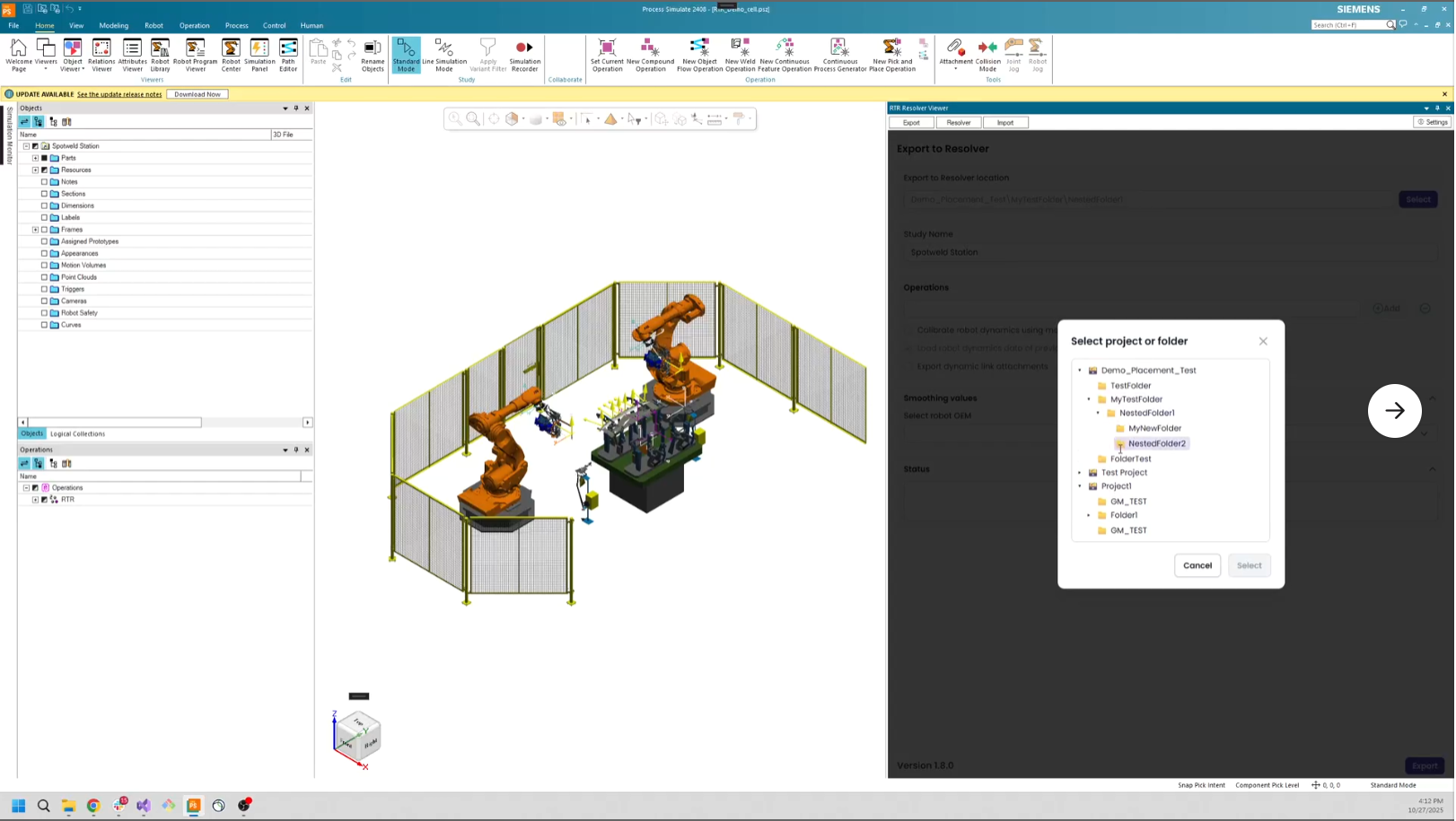
NEU: Eine Studie in einen bestimmten Ordner in Resolver exportieren
- Beim Export nach Resolver können Benutzer auf die Schaltfläche „Auswählen" klicken und über ein neues Ordnernavigationsfenster genau auswählen, wohin ihre Studie exportiert werden soll.
- Ordner müssen in der Plattform-Benutzeroberfläche erstellt werden, um als Exportoption in einem Connector sichtbar zu sein.
Verbessert: Protokollabruf für Fehlermeldungen
- Es gibt jetzt eine Option zum „Protokolle herunterladen", wenn Fehler auftreten, damit Benutzer besser verstehen können, was während eines Fehlers passiert.
- Fehlerprotokolle enthalten einen Zeitstempel und eine Fehlerbezeichnung.
- Hinweis: Erhalten Sie eine Fehlermeldung, die Sie nicht verstehen? Senden Sie uns ein Ticket! Wir möchten unsere Fehlermeldungen weiter verbessern, um sie klar und umsetzbar für Benutzer zu gestalten. Bitte fügen Sie den vollständigen Text der Fehlermeldung Ihrem Ticket bei.
Process Simulate Connector 1.9.1
Erweiterte Konfiguration für FANUC-Roboter und verbesserte Benutzerfreundlichkeit für Roboter mit Gelenkgrenzen
- Verbessert: Erweiterungen und Konfigurationsoptionen bei der Verwendung von FANUC-Robotern
- Benutzer können jetzt CNT 5 als Glättungswert auswählen.
- Die Dynamikkalibrierung von Anfahr- und Rückzugs-Teilaufgaben an Schweißpunkten wurde verbessert.
- Benutzer werden verbesserte Bewegungen bei der Verwendung von FANUC RCS mit zusätzlichen linearen und kleinen Kalibrierungsbewegungen feststellen.
- Verbessert: Stabilität und Caching im Zusammenhang mit Benutzeranmeldung und Authentifizierungsdaten
- Verbessert: RTU-bezogene Exportfunktionalität
- Verbessert: Benutzerfreundlichkeit für Roboter mit Gelenkgrenzen
- Bei der Verwendung von „Gelenkarbeitsgrenzen angeben" mit absoluten Werten, die größer als der Gelenkbewegungsbereich sind, erhalten Benutzer verbesserte Hinweise auf ungültige Gelenkgrenzen.
- Grenzwertprüfungen externer Achsen wurden beim Export erweitert.
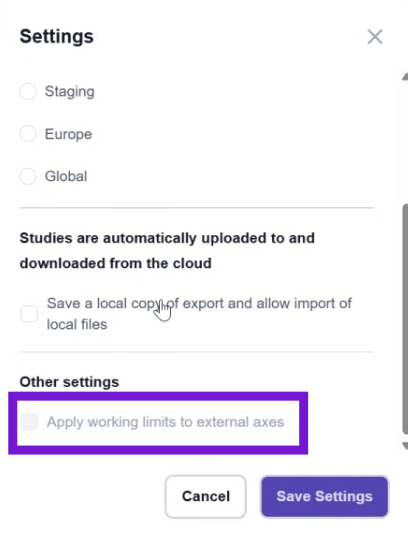
- NEU: Option zur Anwendung von Arbeitsgrenzen auf externe Achsen
- Benutzer haben jetzt die Möglichkeit, Arbeitsgrenzen sowohl auf native Robotergelenke als auch auf externe Gelenke anzuwenden.
- Es gibt ein neues Kontrollkästchen im Einstellungsdialog, das standardmäßig deaktiviert ist, mit der Bezeichnung „Arbeitsgrenzen auf externe Achsen anwenden".
- Wenn das Kontrollkästchen aktiviert ist, werden Arbeitsgrenzen auf externe Achsen angewendet. Wenn es deaktiviert bleibt, werden Arbeitsgrenzen nur auf native Gelenke angewendet.
- Hinweis: Dies ist eine Änderung gegenüber dem vorherigen Verhalten. Zuvor wurden die Arbeitsgrenzen sowohl auf native als auch auf externe Gelenke angewendet. Der neue Standard ist die Anwendung von Grenzen nur auf native Gelenke.
Visual Components und Gemini Connectors 1.9.1
Verbesserte Kollisionserkennung
- NEU: Unterstützung für Robot Executor
- Was bedeutet das? Sie können jetzt Signale nutzen, um Vorrangbeschränkungen zwischen Robotern und anderen Objekten in Ihrer Arbeitszelle mithilfe von Robot Executor anzuwenden.
- Verbessert: Anwendungsfälle für Materialhandhabung
- Benutzer können jetzt die Unterdrückung des Assembly Status Feature für Materialhandhabungsfälle nutzen.
- Verbessert: Plausibilitätsprüfungen für Kollisionsdetektoren
- Benutzer erhalten jetzt eine Fehlermeldung, wenn aktive Kollisionsdetektoren versteckte Objekte enthalten.
- Benutzer erhalten eine Warnung, wenn Objekte in Programmen referenziert, aber nicht in aktiven Kollisionsdetektoren enthalten sind.