Version 2026.01.21

Jetzt verfügbar: Resolver 2026.01.21
Wir freuen uns, das neue Jahr mit der Veröffentlichung von Resolver 2026.01.21 einzuläuten! Diese Version ist voller Verbesserungen, die Ihre Resolver-Erfahrung optimieren sollen. Lesen Sie weiter, um mehr über die Neuerungen in dieser Version zu erfahren.
Resolver wird durch unsere neuesten Connectors unterstützt:
- Process Simulate Connector 1.13.0
- Visual Components Connector 1.12.2
- MELSOFT Gemini Connector 1.12.2
Kompatibilitätsinformationen für unterstützte Simulationswerkzeuge und -versionen finden Sie auf der Seite Mindestanforderungen der Resolver-Dokumentationsseite. Wir empfehlen, immer die neueste Version der Resolver Connectors herunterzuladen, unabhängig von der Version des Simulationswerkzeugs, das Sie verwenden.
Resolver-Produktupdates
Verbesserungen der Benutzerfreundlichkeit und mehr Informationen zu Durchläufen
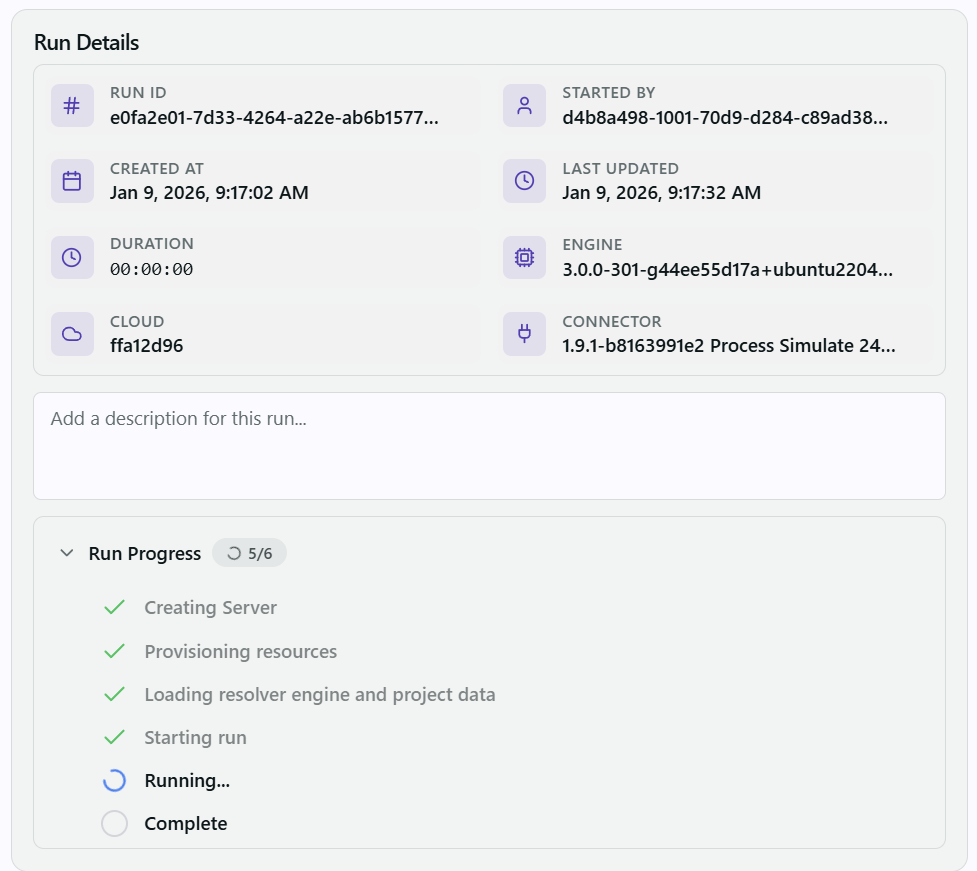
- NEU: Durchlaufdetails auf der Ergebnisseite
- Bei der Ausführung eines Durchlaufs sehen Benutzer jetzt „Durchlaufdetails" zusätzlich zum Durchlauffortschritt.
- Dieser Bereich wird mit Daten zum Durchlauf gefüllt und bleibt nach Abschluss des Durchlaufs in den Durchlaufergebnissen erhalten, um Benutzer zu informieren.
- Hinweis: Dies ist nicht das endgültige Design des Durchlaufdetails-Bereichs, daher können Sie in kommenden Versionen Verbesserungen erwarten.
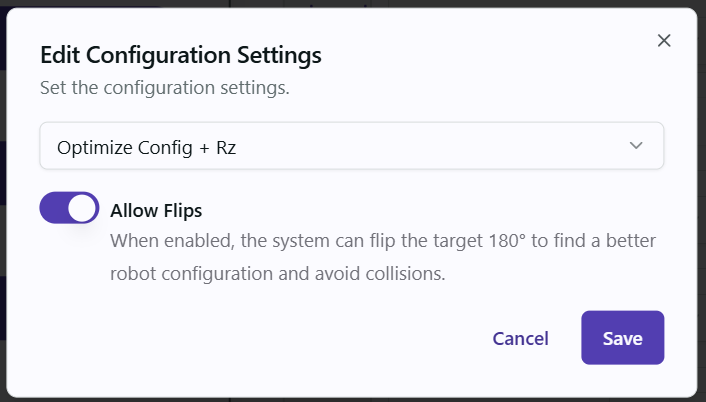
- NEU: Werkzeugflips in der Konfiguration zulassen
- Benutzer können jetzt Flips bei der Konfiguration von Werkzeugoptimierungen zulassen.
- Bitte beachten Sie, dass die Materialstärke bei der Optimierung für Flips nicht berücksichtigt wird. Der Flip erfolgt um den TCP.
-
Verbessert: Roboterzuweisung mit Voreinstellungsänderungen
- Benutzer können jetzt die Roboterzuweisung verwenden, wenn Voreinstellungsänderungen in einer Operation vorhanden sind, was zuvor nicht möglich war.
- Wenn ein Benutzer eine Auswahl während der Roboterzuweisung trifft und die Auswahl eine Voreinstellungsänderung enthält, wird Resolver diesen Roboter im Backend in den Voreinstellungswechsel einbeziehen. Wenn ein Roboter bei der Zuweisung als „Nicht erlaubt" gekennzeichnet wird, wird er aus dem Voreinstellungswechsel entfernt.
-
Verbessert: Automatische Anpassung der Standard-Endbedingung
- Abhängig von den Benutzerauswahlen und der Konfiguration eines Durchlaufs werden die Standard-Endbedingungen jetzt automatisch angepasst, um mehr Zeit für einen Durchlauf zu ermöglichen, wenn eine komplexere Funktion aktiviert ist.
- Benutzer sehen eine Benachrichtigung, wenn sie eine Auswahl getroffen haben, die die Standard-Endbedingung erhöht.
-
Verbessert: UI-Indikatoren
- Die Erreichbarkeitstabelle auf der Ergebnisseite wurde aktualisiert, um den „Best-Case-Szenario"-Status für jedes Ziel in der Zusammenfassung anzuzeigen. Wenn ein Ziel beispielsweise von 1 Roboter erreichbar ist, mit 2 Robotern kollidiert und von 2 Robotern nicht erreichbar ist, zählt die Zusammenfassung dieses Ziel als erreichbar. Dies betrifft nur die Zusammenfassung, die auch in die Kopfzeile der Karte verschoben wurde.

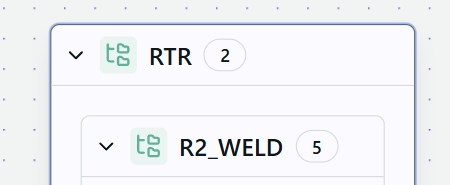
- Auf der Konfigurationsseite sehen Benutzer jetzt eine Zahl in verschachtelten Operationen, die die Anzahl der Aktionen auf der Zeichenfläche angibt. Diese verschachtelten Bereiche sind jetzt auch einklappbar.
- Auf Studienebene können Benutzer Informationen zum Durchlaufstatus einsehen, ohne zur Ergebnisseite navigieren zu müssen.

Alle Connectors
Anpassung beim Export von Objekten in Kollisionen
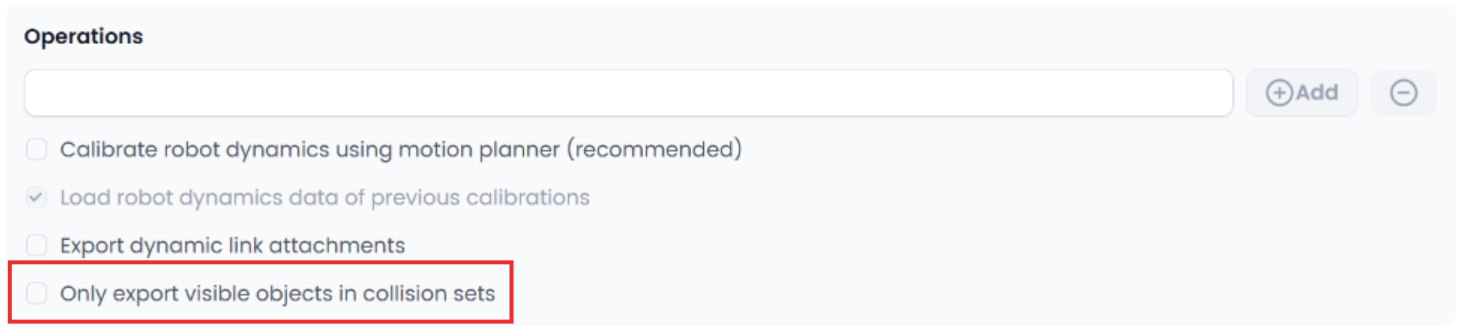
- NEU: Kontrollkästchen zum ausschließlichen Export sichtbarer Objekte in Kollisionssätzen oder Kollisionsdetektoren
- Beim Export können Benutzer nur Objekte exportieren, die als Teil eines Kollisionssatzes oder Kollisionsdetektors identifiziert wurden.
- Hinweis: Wenn dieses Kontrollkästchen aktiviert ist, werden Objekte, die nicht als Teil eines Kollisions- oder Kollisionsdetektorsatzes identifiziert wurden, nicht nach Resolver exportiert und daher nicht in der Pfadplanung berücksichtigt. Wenn importierte Ergebnisse im Simulationswerkzeug Pfade zeigen, die durch Objekte verlaufen, wurden diese wahrscheinlich im Kollisionssatz übersehen.
Process Simulate Connector 1.13.0
Schnelleres Hochladen und klarere Fehlermeldungen
- NEU: Möglichkeit, Objekte in Kollisionssätzen anzuzeigen
- Benutzer werden neben dem Kontrollkästchen „Nur sichtbare Objekte in Kollisionssätzen exportieren" eine neue Schaltfläche bemerken, die es ihnen ermöglicht, die zu exportierenden Objekte anzuzeigen.
- Ein Klick zeigt die Objekte in Kollisionssätzen in Grün an.
- Ein zweiter Klick zeigt Objekte, die nicht in Kollisionssätzen enthalten sind, in Orange an.
- Ein dritter Klick bringt die Benutzer zur normalen Ansicht zurück.
-
NEU: Servo-Wert am Schweißpunkt zur SD-Position beim Import
- Beim Import werden Benutzer feststellen, dass der Servo-Wert und der Ext1-Parameter am Schweißziel auf die SD-Pistolenposition geändert werden.
- Dieses Update soll beim Einlernen von Schweißpositionen helfen.
-
Verbessert: Upload-Geschwindigkeit
- Benutzer werden eine verbesserte Upload-Geschwindigkeit für Dateien größer als 25 MB feststellen, dank einer Backend-Änderung der Upload-Methode.
-
Verbessert: Fehlermeldungen
- Benutzer werden neue und klarere Fehlermeldungen bei Importfehlern erhalten.
Visual Components und Gemini Connectors 1.12.2
Fehlerbehebungen und klarere Fehlermeldungen
- Verbessert: Anzahl der Klicks für Auswahlen
- Benutzer werden weniger Klicks beim Treffen von Auswahlen für den Import und beim Schließen von Menüs im RTR Viewer bemerken.