Collision Rules
Export von Collision Sets
Process Simulate und die RTR-Engine gehen Kollisionen auf grundlegend unterschiedliche Weise an. Process Simulate geht davon aus, dass keine Collision Sets existieren, sofern der Benutzer sie nicht explizit definiert. RTR hingegen führt eine standardmäßige Kollisionsprüfung zwischen allen Robotern und der Szene durch. Weitere Informationen finden Sie im Abschnitt Collision Rules.
Wenn zum Exportzeitpunkt keine Collision Sets im Collision Viewer aktiv sind, wird das RTR-Standardverhalten verwendet. Andernfalls werden Collision Rules im Export erzeugt, die mit dem übereinstimmen, was in PS definiert wurde.
Unterstützte Objekte für Collision Rules
Die Resolver-Engine unterstützt 3D- und 2D-Objekte in Collision Rules. 1D-Objekte – ITx1Dimensional – werden nicht unterstützt; dazu zählen Elemente wie Punktwolken und PolyLines. Wenn solche Objekte als Kollisionsobjekte einbezogen werden sollen, sollte eine 2D- oder 3D-Repräsentation verwendet werden.
Collision Rules
Collision Rules ist ein allgemeiner Begriff, der definiert, wie sich Kollisionen zwischen zwei oder mehr Objekten verhalten. Es gibt grundlegende Unterschiede darin, wie Kollisionen zwischen Process Simulate und der RTR-Engine definiert werden.
Standardverhalten von Process Simulate
Standardmäßig berücksichtigt Process Simulate keine Kollisionen zwischen Objekten. Es liegt in der Verantwortung des Benutzers, alle Collision Sets zu definieren. Eine Kollision wird erkannt, wenn ein Objekt in der Spalte Check ein Objekt in der Spalte With berührt.
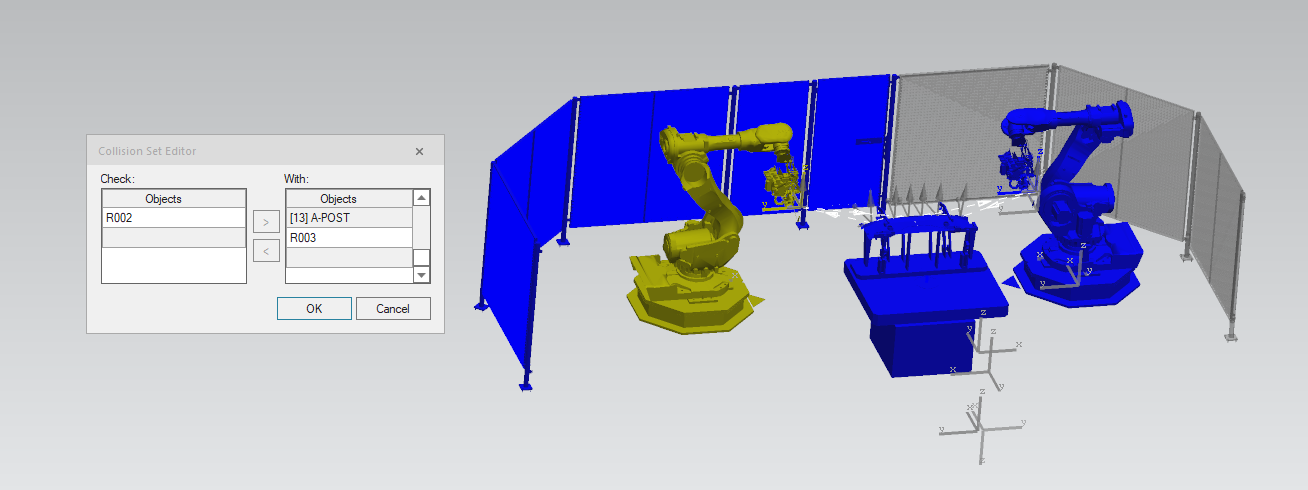
Zu jedem Collision Set gehört außerdem ein Near Miss-Wert. Dieser dient als Warnung für den Benutzer, dass sich zwei Objekte nahe beieinander befinden.

Weitere Informationen zum Kollisionsverhalten in Process Simulate: https://docs.sw.siemens.com/en-US/doc/288782031/PL20231017544579710.tecnomatix_eMS.xid1015765/ToolsMenu_Options_CollisionTab
Standardverhalten der RTR-Engine
Standardmäßig erkennt die RTR-Engine Kollisionen für jeden Robot-to-Robot- und Robot-to-World-Kontakt. Der Mechanismus, mit dem der Benutzer dieses Verhalten anpassen kann, erfolgt über „disable collision rules“ – also das Gegenteil des Process-Simulate-Verhaltens. Daher ist beim Konvertieren eines Process-Simulate-Projekts in ein RTR-Projekt besondere Sorgfalt geboten.
Kollision vs. Clearance
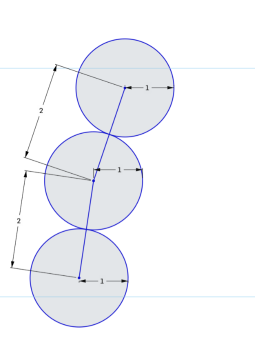
Aus Sicht der Bewegungsplanung innerhalb der RTR-Engine sind Clearances und Kollisionen dasselbe Konzept. Eine Kollision ist lediglich ein Clearance-Wert von 0 mm. Beachten Sie, dass der standardmäßige globale Clearance-Wert bei der Pfadgenerierung 1 mm beträgt. Die Clearance wird HÖCHSTENS alle 2 mm auf einer Pfadkante geprüft.
Die RTR-Engine verletzt Clearance- (oder Kollisions-) Werte, wenn kein alternativer Pfad verfügbar ist. Jeder innerhalb der Engine bewertete Lösungsweg ist mit Kosten verbunden, anhand derer bestimmt wird, welcher Pfad der beste ist. Jeder Pfad, der eine Clearance-Regel verletzt, erhält hohe Kosten; steht jedoch nur ein Pfad mit kollisionsbehafteten Lösungen zur Verfügung, wird dieser ausgewählt. Diese Vorgehensweise ist für Kunden am flexibelsten und zwingt sie nicht, erwartete Kollisionen explizit hinzuzufügen oder zu entfernen.
Als Beispiel sind Kollisionen zwischen Schweißzangenspitzen und dem Bauteil zu erwarten. In Process Simulate wird dies durch das Hinzufügen von „ignore collision rules“ innerhalb der Tool-Definition geregelt. Würde die RTR-Engine ähnlich verfahren, würden die Schweißspitzen dauerhaft ignoriert, was zu kollidierenden Bewegungspfaden führen würde. Stattdessen bleiben die Schweißspitzen Kollisionsobjekte, dürfen jedoch nur bei Bedarf in Kollision geraten – dadurch entstehen kollisionsfreie Bewegungspfade, die nur an der Schweißstelle kollidieren.