Study exportieren
Was wird exportiert?
Elemente einer Process Simulate Study müssen nach Resolver exportiert werden, um Bewegungspfade, Interlocks und Aufgabenverteilungen optimal zu generieren. Der PS ConnectorSoftware plugins, developed by RTR, that enables the export of projects from 3rd party simulation tools such as Process Simulate and Visual Components for use with Resolver. The Connector also enables... sammelt die erforderlichen CAD-Objekte, Kinematik, Dynamik, Operations und Targets aus der PS Study und lädt sie beim Export automatisch zu Resolver hoch.
Der Exporter erzeugt eine .zip-Datei, die von Resolver interpretiert wird. Innerhalb der .zip-Datei werden die folgenden Dateien erstellt:

project.yaml
Definiert, wie die Engine den Workcell aufbauen soll. Sie enthält Verweise auf alle Elemente in den Ordnern objects und robot_models. Die Engine verwendet diese Datei, um festzulegen, wie Objekte positioniert und verbunden werden.
queries.json
Definiert die vom Exporter erzeugte Query. Operations, Targets, Reihenfolgebedingungen usw. werden hier definiert.
metadata.json
Erfasst einige Performance- und Study-Daten, die zur Anpassung der Benutzererfahrung verwendet werden.
objects
Speichert alle .jt-Dateien der statischen Objekte, die exportiert werden.
robot_models
Speichert die .jt-Dateien der Robotermodelle, die zusammen mit den Kinematikdefinitionen aus der project.yaml zur Erstellung virtueller Robotermodelle verwendet werden.
Export vorbereiten
Angezeigte Objekte
Alle Objekte (einschließlich Roboter), die aktuell angezeigt werden, werden in den Export, der an Resolver gesendet wird, einbezogen.
- Blanken Sie alle Objekte aus, die für die Bewegungsplanung nicht erforderlich sind. Dies kann die Dateigröße und die Berechnungen zur Kollisionsprüfung drastisch reduzieren und die Performance verbessern.
- Alle nicht geblankten Roboter ohne zugeordnete exportierte Operation werden als statische Objekte in ihrer aktuellen Pose exportiert.
Dynamic Link Attachments
Was sind Dynamic Link Attachments?
Dynamic Link Attachments sind Objekte in Ihrer Process Simulate Study, deren Position oder Form von den Gelenken des Roboters abhängt – zum Beispiel Kabel, Verbindungsstäbe, Dressing-Pakete oder andere Geräte, die sich mit dem Roboter bewegen. Da sie sich mit dem Roboter bewegen, können sie die Kollisionsprüfung beeinflussen und müssen in der exportierten Kollisionsgeometrie enthalten sein, wenn sie für die Bewegungsplanung relevant sind.
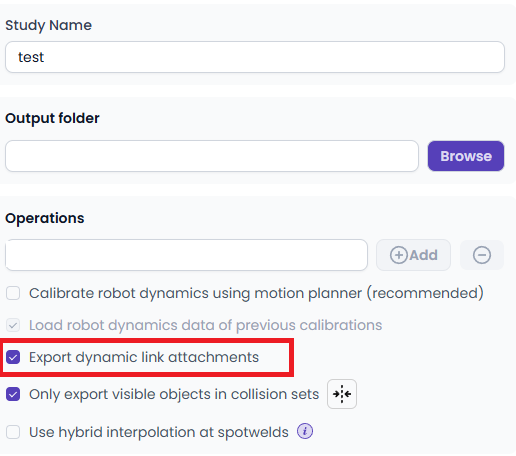
Verwenden Sie Export dynamic link attachments, wenn Ihre Process Simulate Study solche dynamischen, mit dem Roboter verbundenen Objekte enthält, die in die exportierte Kollisionsgeometrie aufgenommen werden müssen.
- Dynamische Gelenke und Geräte, die unter Robot Jog -> All Joints aufgeführt sind, werden unabhängig von dieser Umschaltung exportiert.
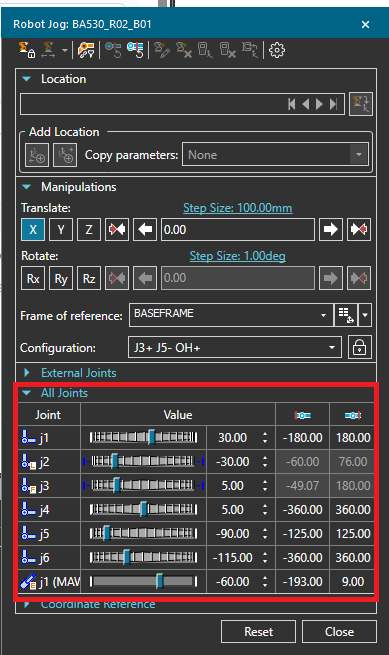
- Wenn ein Objekt dynamisch ist, weil es von Robotergelenken abhängt, aber nicht in Robot Jog -> All Joints aufgeführt ist, aktivieren Sie Export dynamic link attachments, um es in den Export einzubeziehen.
- Aktivieren Sie diese Option, wenn das angehängte Gerät für die Planungsgenauigkeit kollisionskritisch ist.
- Lassen Sie sie deaktiviert, wenn diese Anhänge nicht erforderlich sind, um den Exportumfang kleiner zu halten.
- Große, komplexe dynamische Anhänge können die Rechenzeit erhöhen. Zum Beispiel fügen durch Dutzende kugelförmiger Primitive dargestellte Dressing-Pakete Kollisionsgeometrie hinzu, die Export und Planung verlangsamen kann.
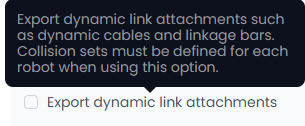
Wenn diese Option aktiviert ist, stellen Sie sicher, dass für die betreffenden Roboter in Process Simulate aktive Collision Sets konfiguriert sind.
Wenn Resolver Probleme beim Export von Anhängen meldet, siehe:
Collision Sets
Es ist sehr wichtig, dass Collision Sets aktiviert und korrekt eingerichtet sind. Die in PS definierten Collision Sets werden in collision_rules in der project.yaml übersetzt. Diese Collision Rules werden von der Resolver-Engine während der Bewegungsplanung verwendet. Wenn die Collision Sets unsachgemäß oder unvollständig definiert sind, können im Ergebnis unerwartete Bewegungspfade auftreten.
- Alle über das PS-Feature collision sets eingerichteten und aktivierten Kollisionen werden in der Engine als harte Kollisionsregel gesetzt. Die Engine verletzt niemals eine harte Regel.
- Der mit dem Collision Set verbundene Near Miss-Wert wird in eine Clearance-Regel in der
project.yamlumgewandelt. Clearance-Regeln sind weiche Regeln, die nur verletzt werden, wenn es erforderlich ist.- Für alle Collision Sets, in deren Nähe sich Process Points befinden, wird dringend empfohlen, einen Near Miss-Wert < 2 mm zu verwenden.
- Hinweis: Bitte gehen Sie beim Setzen von Near-Miss-Werten mit Bedacht vor. Nach der Durchführung vieler Studien mit Resolver hat unser Customer-Success-Team festgestellt, dass Menschen ihre eigenen Clearance-Regeln beim Erstellen von Pfaden häufig selbst nicht einhalten.
- Beispiel: Ein kurzer Abstand zwischen zwei Spot Welds, bei dem ein Mensch keine Via zwischen dem Depart des ersten Welds und dem Approach des zweiten Welds setzen würde. Handelt es sich um einen geplanten Pfad in Resolver und die Depart-Position verletzt einen Near-Miss-Wert, fügt die Engine eine Via zwischen den beiden Welds hinzu, um zu versuchen, die Schweißzange aus der Clearance-Verletzung heraus zu bewegen.
- Empfohlene Mindest-Collision-Sets:
- Robot-Robot: Collision Sets zwischen Robotern. Resolver unterstützt eine einzelne Clearance-Regel für alle Roboter in der Study. Daher wird der größte Robot-Robot-Near-Miss-Wert verwendet, der in allen Collision Sets gefunden wird.
- Robot-Scene: Collision Sets zwischen Robotern und statischen Objekten in der Szene. Wenn Sie in den Ergebnissen Kollisionen sehen, liegt das typischerweise daran, dass ein Objekt nicht in einem Collision Set enthalten war.
- Hinweis: Viele Kunden verwenden gerne granularere Collision Sets wie robot-structural, robot-jig, robot-part, tool-part. Dies ermöglicht individuelle Clearance-Regeln für jedes Collision Set.
- Robot-(Tool+RTU): Dies ist ein Self-Collision-Set. Wenn Ihre Anwendung Bewegungen erzeugt, bei denen der Roboter eng bei sich selbst anliegen muss, wird empfohlen, ein Collision Set einzurichten, das Selbstkollisionen verhindert.

Weitere Anwendungen können als Service mit Unterstützung eines RTR Application Engineers unterstützt werden. Bitte öffnen Sie ein Support-Ticket, wenn Sie sich nicht sicher sind, ob Ihre Study unterstützt wird oder wenn Sie eine Study ausführen möchten, die außerhalb der aktuellen Tool-Unterstützung liegt.
Dynamikkalibrierung
Wenn ausgewählt, führt der Exporter den Roboter durch eine Reihe von Bewegungen, um alle Gelenkdynamiken für Joint- und Linear-Motion zu ermitteln. Der zum Exportzeitpunkt ausgewählte Motion Planner wird zur Durchführung der Dynamikkalibrierung verwendet.
- Verwenden Sie nach Möglichkeit stets einen RCS Motion Planner. Die geschätzte Cycle Time und Dynamik können drastisch voneinander abweichen, wenn beispielsweise beim Export MOP ausgewählt wurde und später RCS verwendet wird.

- Lösungen von Resolver können stark von der Dynamik beeinflusst werden, insbesondere wenn es viele Robot-Robot-Deconfliction-Zonen gibt. Wenn die Dynamik nicht korrekt kodiert ist, stellen Sie bitte sicher, dass die richtigen RCS-Verbindungen hergestellt wurden, und führen Sie die Dynamikkalibrierung erneut durch.
- Die Dynamikkalibrierung nimmt Zeit in Anspruch, muss aber in der Regel nur einmal pro Roboter durchgeführt werden. Daher werden die Dynamiken standardmäßig lokal auf Ihrer Maschine zwischengespeichert und für zukünftige Exporte wiederverwendet.
- Wenn sich etwas in Ihrem Roboter-Setup ändert, das die Dynamik beeinflusst, z. B. eine Änderung der Nutzlast, verwenden Sie bitte das optionale Kontrollkästchen, um die Dynamikkalibrierung erneut durchzuführen.
Pfade mit dem MOP Motion Planner ausführen
Von RTR erzeugte Pfade folgen demselben allgemeinen Konzept wie echte Robotersteuerungen zur Synchronisierung der Gelenke, um das Ziel-Target gleichzeitig zu erreichen. Der MOP Motion Planner zeigt dieses Verhalten jedoch standardmäßig nicht. Kollisionen im Pfad können auftreten, wenn der Parameter single_joint_prof in der Datei motionparameters.e der Robotersteuerung nicht richtig gesetzt ist. Aus dem Process Simulate-Handbuch zu motionparameters.e:
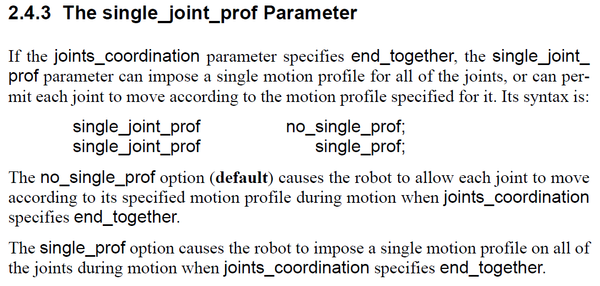
Um die von RTR und anderen Roboterherstellern vorhergesagte Bewegung zu erreichen, fügen Sie bitte die Zeile single_joint_prof single_prof; in die Datei motionparameters.e ein.
Operations exportieren
Derzeit ist Resolver darauf ausgelegt, mehrere Operations oder Compound Operations im Standard-Modus zu exportieren. Alle exportierten Operations nutzen alle definierten Verknüpfungen (im Sequence Editor) zwischen Operations zur Ermittlung der Reihenfolgebedingungen. Einige Regeln, die für die ausgewählten Operations gelten:
- Nur Targets, die der Roboter erreichen muss, sollten einbezogen werden. Typischerweise umfasst dies nur die Process Points, kann aber auch eine Via enthalten, wenn der Prozess einen Stopp in dieser Pose erfordert. Der Pfad zwischen jeder an Resolver gesendeten Location wird geplant, sofern er im Cloud UI nicht als „direct“ angegeben ist.
- Für jeden Roboter mit Operations müssen eine Start- und Endpose definiert sein. Der Exporter verwendet die implizierten Start- und Endposen der ersten und letzten Location in der Operations-Sequenz des Roboters.
- Wenn einer Operation ein Roboter zugewiesen ist (kann unter Operation->Properties->Process-Tab überprüft werden), wird vor dem Export eine Reachability-Prüfung durchgeführt. Wenn der Benutzer keine Konfiguration definiert, verwendet der Exporter die Konfiguration, die die Process Simulate-API mit der Funktion „jump“ auswählt. Die Konfiguration kann selbstverständlich von Resolver optimiert werden, wenn dies im Cloud UI aktiviert ist.
- Wenn eine Operation exportiert wird, der kein Roboter zugewiesen ist, geht der Exporter davon aus, dass alle exportierten Roboter (für die weiterhin Start-/End-Targets definiert sein müssen) dieses Target erreichen dürfen. Dies ist eine gängige Methode, um ein „Robot Allocation“-Problem einzurichten.
- Die Target-Reihenfolge bleibt in den Ergebnissen erhalten, wenn Optimize Target Order nicht ausgewählt ist.
-
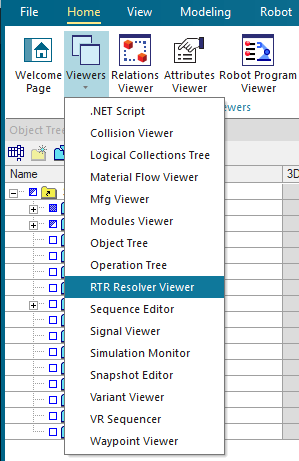
Stellen Sie sicher, dass der RTR Resolver Viewer sichtbar ist. Falls nicht, wählen Sie ihn über die Schaltfläche „Viewers“ im Ribbon aus.
-
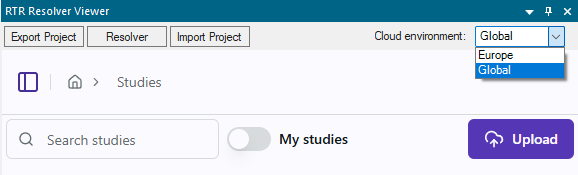
Wenn Sie sich noch nicht angemeldet haben, wählen Sie bitte zunächst die korrekte Cloud-Umgebung aus dem Dropdown-Menü aus.
- Europe: Standort in Europa
- Global: Amerika, APAC, alle anderen Länder.
-
Geben Sie dem Export im Export-Bereich einen Namen (Name der Study).
-
Fügen Sie Operations oder Compound Operations hinzu, die Sie exportieren möchten, indem Sie sie aus dem
Operations Treeauswählen und im Export-Bereich auf die Schaltfläche+Addklicken. -
Es wird empfohlen, „Calibrate robot dynamics (recommended)“ auszuwählen. Wenn ausgewählt, bewegt der Exporter die Roboter mithilfe der derzeit ausgewählten Robotersteuerung durch eine Reihe von Locations. Er verfolgt die Bewegungen und zeichnet die Dynamik der Gelenke auf. Schweißzangen werden an den Schweißungen ebenfalls betätigt, um die Task Time am Process Point zu erfassen. Diese Werte werden in die queries.json eingebettet und von der Resolver-Engine verwendet, um eine genauere Vorhersage der Cycle Time zu ermöglichen.
-
Wählen Sie den Roboter-OEM aus, um anzugeben, welche controller-spezifischen Smoothing-Optionen verwendet werden sollen. Standardmäßig sind alle enthalten. Sie können alle Optionen abwählen, die Resolver nicht verwenden soll.
Hinweis: Die Option
FINEkann nicht abgewählt werden, da sie für das Interlocking an neu generierten Via-Locations erforderlich ist. -
Klicken Sie auf
Export, um die Study zu exportieren und automatisch in die Cloud hochzuladen.