Unterstützte Funktionen
Software
Bitte sehen Sie im Abschnitt Mindestanforderungen nach, welche Software-Versionen unterstützt werden.
Study-Modi
In Process Simulate wird ausschließlich der Standard-Modus unterstützt. Der Line Simulation-Modus wird nicht unterstützt.
Unterstützte Anwendungen
- Spot Welding
- Riveting
- Inspection
- Point-to-Point-Bewegung
- Material Handling
- RTU
- Tool Changer
Roboter
Abgesehen von den unten genannten bekannten Einschränkungen sind im Allgemeinen keine Probleme mit dem Export von Robotern zu erwarten. Während des Exports werden die CAD-Daten der Roboter-Links im cad-Ordner der erzeugten .zip-Datei abgelegt. Kinematik und Dynamik werden in der project.yaml kodiert. Die Dynamik für jedes Joint wird direkt aus dem Robotermodell übernommen, es sei denn, das Kontrollkästchen Calibrate Robot DynamicsSetting in Export to RTR dialog, if selected, will attempt to automatically calibrate dynamics of the robots for use in the RTR engine. Using whatever controller and motion planner selected in Process... ist beim Export aktiviert.
Unterstützt
- 6 DoF-Roboter
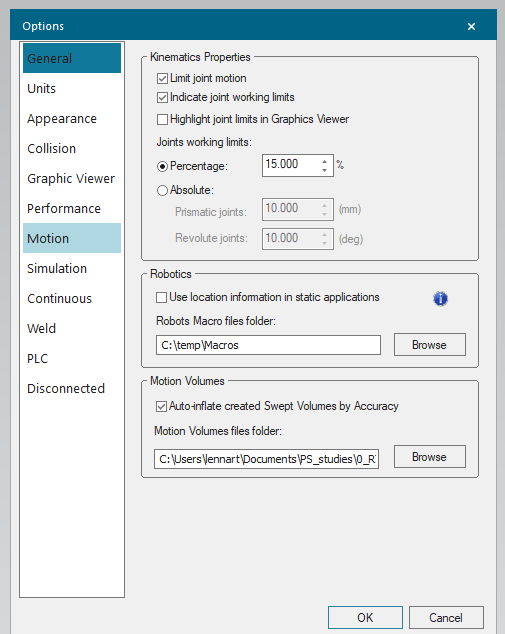
- Joint Working Limits
- Wenn in PS die Option „indicate joint working limits“ aktiviert ist, werden die Arbeitsgrenzen des Roboters gemäß den Einstellungen (prozentual oder absolut) reduziert, sodass die gewünschten Grenzen nicht verletzt werden. Diese Grenzen werden beim Export an jedem Target überprüft, und dem Benutzer wird eine Warnung angezeigt, falls sie verletzt werden. Der Wert wird in der exportierten
project.yamlangepasst. Hinweis: Bei variablen Joint Limits kann es zu kleinen numerischen Abweichungen vom PS-Verhalten kommen, feste Joint Limits sollten jedoch exakt übereinstimmen.
- Wenn in PS die Option „indicate joint working limits“ aktiviert ist, werden die Arbeitsgrenzen des Roboters gemäß den Einstellungen (prozentual oder absolut) reduziert, sodass die gewünschten Grenzen nicht verletzt werden. Diese Grenzen werden beim Export an jedem Target überprüft, und dem Benutzer wird eine Warnung angezeigt, falls sie verletzt werden. Der Wert wird in der exportierten
Nicht unterstützt
- Roboter, die keine 6 DoF-Roboter sind, einschließlich 7 DoF-, SCARA-, Delta- und Gantry-Roboter.
- Hinweis: Diese Roboter lassen sich möglicherweise exportieren und in der Engine sogar Ergebnisse erzeugen, aber die Engine ist nicht für diese Typen optimiert und kann unerwartetes Verhalten zeigen.
- Joints, die Teil mehrerer variabler Joint-Polygone sind.
- Konkave Polygone für variable Joint Limits.
Objekte
Unterstützt
- 3D-Objekte (Komponenten, Swept Volumes usw.)
- 2D-Objekte (Ebenen, Sicherheitszonen usw.)
Nicht unterstützt
- 1D-Objekte (Linien, Punkte usw.)
Frames
Es werden nur Frames exportiert, die innerhalb der exportierten Operations einen Zweck haben. Ein Beispiel wäre ein Frame, der als TCP in einer exportierten Operation verwendet wird.
Parts/Appearances
Appearances werden unterstützt und in den Export aufgenommen, wenn sie zum Zeitpunkt des Exports angezeigt werden oder während einer der exportierten Operations durch einen OLP-Befehl (z. B. # Display) angezeigt werden.
Punktwolken
Punktwolken werden derzeit nicht unterstützt, da sie in die Kategorie der 1D-Objekte fallen.
Motion Volumes
Motion Volumes werden unterstützt, da sie in die Kategorie der 3D-Objekte fallen. Sie werden in den Export aufgenommen, wenn sie zum Zeitpunkt des Exports angezeigt werden oder während einer der exportierten Operations durch einen OLP-Befehl (z. B. # Display) angezeigt werden.
Motion Volumes können sehr nützlich sein, um Sperrzonen für die Resolver-Engine zu definieren. Zwei gute Anwendungsfälle sind:
- Die Pfade von Roboter A sind für den Prozess bereits festgelegt, aber es gibt einen nahegelegenen Roboter (Roboter B), der parallel arbeitet, und für diesen werden von Resolver Bewegungspläne erstellt. Es wird empfohlen, das Motion Volume von Roboter A während der Operations anzuzeigen, damit es als Sperrzone für Roboter B dient. Denken Sie daran, das Motion Volume in einem Collision Set mit Roboter A aufzunehmen, damit die Resolver-Engine weiß, dass sie es vermeiden muss.
- Ein zustandsbehaftetes Nicht-Roboter-Gerät (z. B. Spanner, Drehtische) in der Szene wird während der Operation angesteuert, und Resolver muss diesen Raum beim Übergang vermeiden. Derzeit unterstützt Resolver nur einen Sprung zustandsbehafteter Nicht-Roboter-Geräte und keine Kinematik zur Simulation der Bewegung. Motion Volumes können jedoch verwendet werden, um die Bewegung des Geräts per OLP-Befehl (
# Display/# Blank) auszublenden.
Beispiel für ein Swept Volume, das zur Definition einer Sperrzone für die Bewegung eines Drehtisches verwendet wird.
OLP-Befehle
Nachfolgend finden Sie die Liste der unterstützten/nicht unterstützten OLP-Befehle, die von Kunden angefragt wurden. Beachten Sie, dass dies keine vollständige Liste aller Process Simulate OLP-Befehle ist, da viele keine Auswirkungen auf die Ergebnisse der Engine hätten. Wenn Ihre Operation einen OLP-Befehl verwendet, der in den folgenden Listen nicht aufgeführt ist, können Sie davon ausgehen, dass er ignoriert wird. Um zusätzliche Funktionen anzufragen, reichen Sie bitte ein Support-Ticket ein.
Unterstützt
# Blank/# Display# Attach/# Detach# Grip/# Release# WaitTime# DriveDevice/# JumpDevice/# WaitDevice/# DriveDeviceJoints- Hinweis: Nicht unterstützt, wenn diese auf Joints des Roboters angewandt werden (native Roboter-Joints und externe Achsen).
- Hinweis: Wenn ein
# DriveDevice-Befehl innerhalb der OLP-Befehlsliste einer Location keinen zugehörigen# WaitDevice-Befehl hat, führt PS den Rest der aktuellen Operation aus, geht aber nicht zur nächsten Operation über, ohne dass der Zustandswechsel abgeschlossen ist. Der Exporter kodiert dasselbe Verhalten in der an die Engine gesendeten Query, indem der Zustandswechsel an das Ende der Operation des Targets angehängt wird. - Hinweis: Diese Befehle auf einem einzelnen Gerät (z. B. Trunnion) aus verschiedenen Operations (z. B. Roboter A, B, C) parallel werden nicht unterstützt. Wir haben Anwendungsfälle von Kunden gesehen, bei denen alle 3 Roboter gleichzeitig einem gemeinsamen Trunnion-Jig befehlen zu fahren. Dies wird nicht unterstützt.
# Connect/# Disconnect# Mount/# Unmount- Free-Text-Befehle, wenn der Text einem der unterstützten Standardbefehle exakt entspricht. Wenn die Geräte-Suche für den Free-Text-Befehl mehr als 1 Gerät zurückgibt, gibt der Resolver Connector einen Fehler aus.
Nicht unterstützt
# SendSignal/# SetSignal/# WaitSignal# GunToState
Im Import-Dialog gibt es eine Option „Copy existing OLP commands“, die standardmäßig aktiviert ist. Wenn aktiviert, versucht der Connector beim Import der Ergebnisse, die ursprüngliche Operation zu finden und vorhandene OLP-Befehle zu kopieren – unabhängig davon, ob sie in der Engine verwendet wurden oder nicht. Die Position dieser OLP-Befehle in der Operation kann sich verschieben, falls eine Optimierung der Target-Reihenfolge oder eine Robot Allocation auf die Operation angewendet wird.
Alle unterstützten Aktionen werden als eine oder mehrere Actions oder SubActions innerhalb der Query kodiert. Alle nicht unterstützten OLP-Befehle werden als DummyAction oder DummySubActions kodiert.
Location-Typen
Unterstützte Location-Typen:
- Via (TxRoboticViaLocationOperation)
- Spotweld (TxWeldLocationOperation)
Der Importer setzt voraus, dass die exportierte Operation zum Zeitpunkt des Ergebnisimports noch in der PS Study vorhanden ist. Der Importer sucht die ursprüngliche Operation und kopiert Daten der Locations einschließlich des Location-Typs. Für einen erfolgreichen End-to-End-Workflow ist es wichtig, dass die exportierte Operation unverändert bleibt, bis die Ergebnisse aller darauf bezogenen Resolver-Runs importiert wurden. Wenn Sie das Programm bearbeiten müssen, während Resolver läuft, wird empfohlen, ein Duplikat zu erstellen, bis die Ergebnisse importiert wurden.
Location-Parameter
Der Exporter übergibt die folgenden Location-Parameter an die Engine:
- Name
- ExternalID
- Config
- Interpolation
- Speed
- TCP
- OLP-Befehle
Alle exportierten Locations werden als „Process Points“ betrachtet, und daher wird für sie ein Smoothing-Wert von null gesetzt. Luftbewegungen zu und von diesen Process Points erhalten Smoothing-Werte, sofern zulässig (standardmäßig zulässig).