Collision Rules
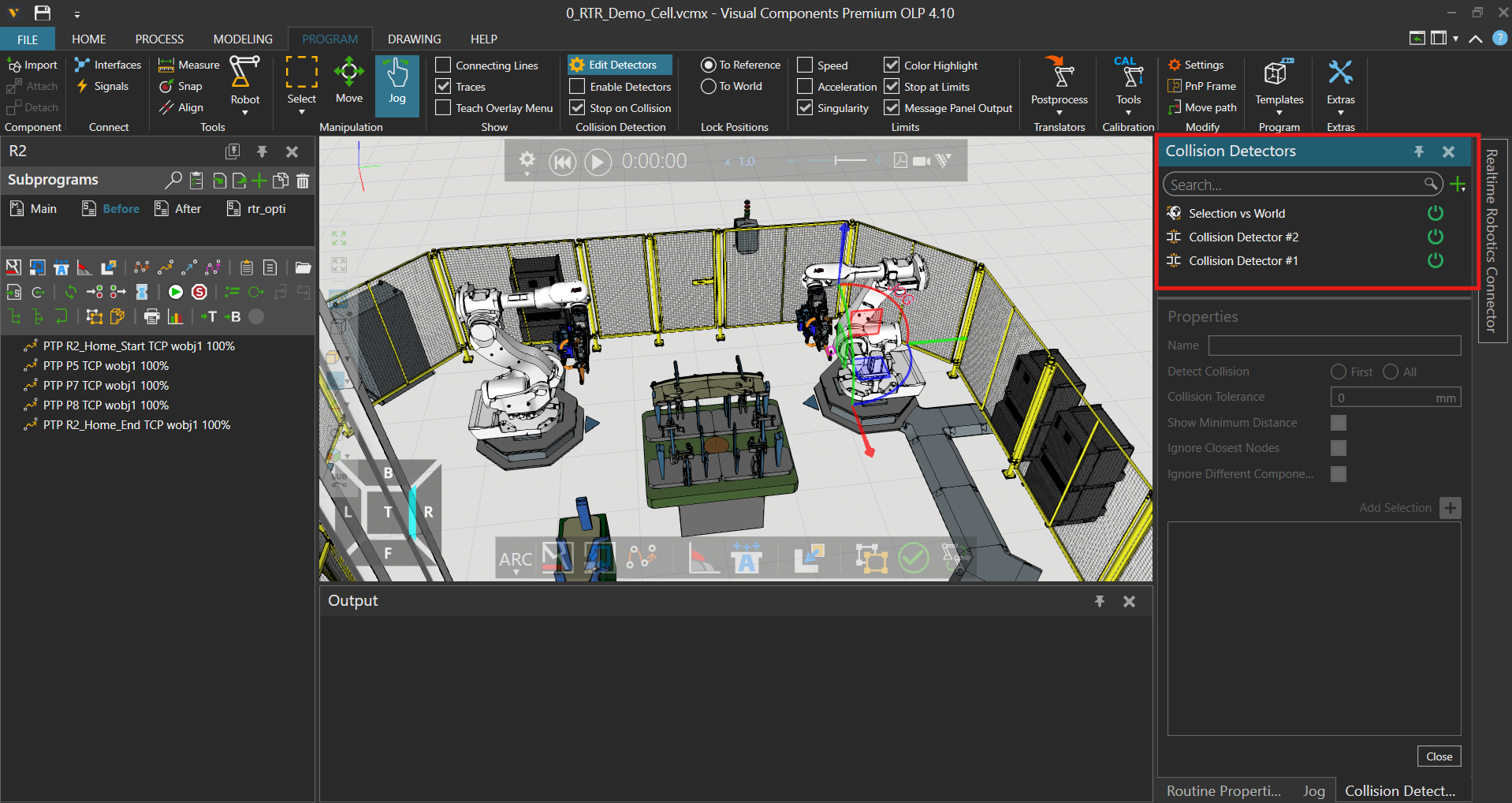
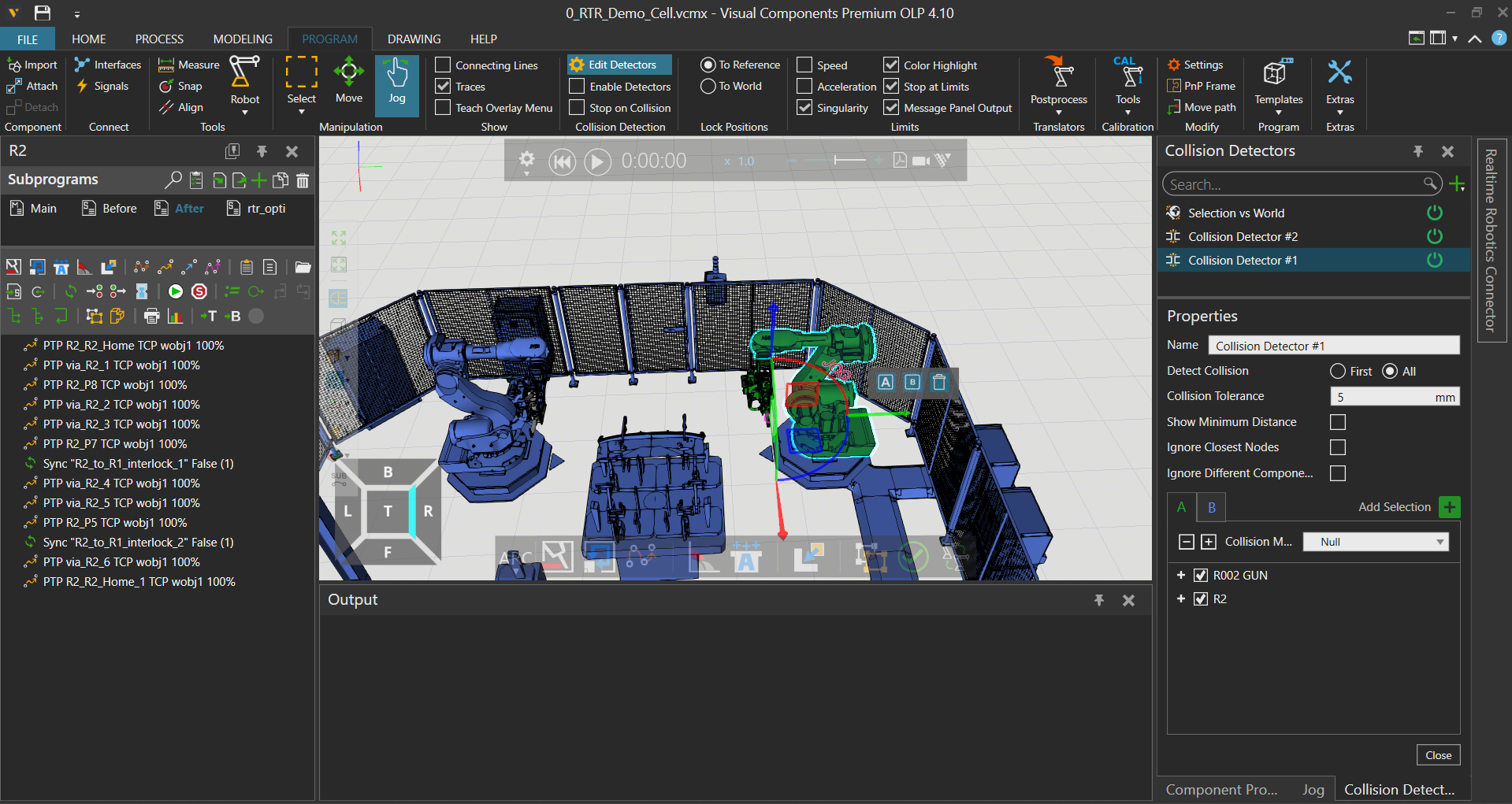
Export von Kollisionsdetektoren
Visual Components und die Resolver-EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... unterstützen beide Kollisionsdetektion, folgen aber unterschiedlichen Standardverhalten:
| Verhalten | Visual Components | Resolver-Engine |
|---|---|---|
| Standardmäßige Kollisionsprüfung | Aus – keine Kollisionen, sofern nicht explizit aktiviert | Ein – standardmäßig vollständige Kollisionsdetektion |
| Benutzerkontrolle | Muss definieren, was geprüft werden soll | Kann definieren, was nicht geprüft werden soll |
| Kollisionstoleranz | Wird als Proximity-Warnschwelle verwendet | Wird bei der Planung als „weiche“ Randbedingung behandelt |
Collision Rules verstehen
Collision Rules definieren, wie sich das System verhalten soll, wenn Objekte in Kontakt kommen – ob Kollisionen unter bestimmten Bedingungen vermieden, zugelassen oder toleriert werden sollen.
Visual Components: Standardverhalten
Standardmäßig prüft Visual Components keine Kollisionen, es sei denn, ein Collision Set ist explizit aktiviert.
- Die Kollisionsdetektion erfolgt nur zwischen Objektpaaren, die in den Spalten A und B angegeben sind.
- Benutzer müssen diese Sets manuell konfigurieren.
- Jedes Set kann eine Collision Tolerance enthalten, die als Warnschwelle für Annäherung dient.
Weitere Informationen in der Visual Components Academy
Resolver-Engine: Standardverhalten
Die Resolver-Motion-Planning-Engine prüft standardmäßig alle Kollisionen, einschließlich:
- Robot-to-Robot
- Robot-to-World
- Robot-to-Environment
Anstatt von Benutzern zu verlangen, zu definieren, was geprüft werden soll, erlaubt Resolver, bestimmte Prüfungen bei Bedarf zu deaktivieren.
Beim Konvertieren von Visual Components in Resolver stellt der Exporter sicher, dass alle definierten Collision Sets respektiert und entsprechend abgebildet werden.
Kollision vs. Clearance
In Resolver sind Kollisionen und Clearances vereinheitlichte Konzepte:
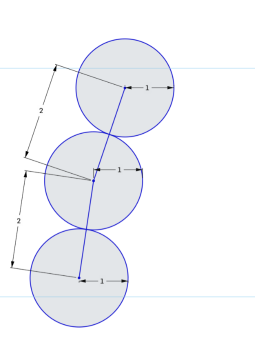
- Eine Kollision ist definiert als eine Clearance von 0 mm.
- Die standardmäßige globale Clearance beträgt 1 mm und wird höchstens alle 2 mm entlang eines Bewegungssegments geprüft.
Wie die Engine Konflikte löst
Die Engine wendet auf jeden Kandidatenpfad eine Kostenfunktion an. Pfade, die Clearance- oder Kollisionsregeln verletzen, erhalten eine hohe Strafe, sodass der Planner kollisionsfreie Bewegungen stark bevorzugt. Eine Verletzung wird nur dann gewählt, wenn jeder mögliche Pfad in Kollision wäre.
Das bedeutet, dass Sie nicht für jedes Szenario manuell „ignore collision“-Regeln hinzufügen oder entfernen müssen. Die Engine ermittelt dynamisch die beste Option – wobei sie nach Möglichkeit kollisionsfreie Bewegungen bevorzugt, aber eine kontrollierte Verletzung zulässt, wenn es unbedingt erforderlich ist.
Praktisches Beispiel: Kontakt der Schweißzangenspitze
Erwartete Kollisionen – wie etwa der Kontakt einer Schweißspitze mit einem Bauteil – werden von den beiden Systemen unterschiedlich behandelt.
In Visual Components
Visual Components bietet keine Möglichkeit, Kollisionen dynamisch nur im Moment des Kontakts zu erlauben (anders als beispielsweise die „Smart Tip“-Funktion von Process Simulate). Stattdessen werden Kollisionen durch Einrichten von Kollisionsdetektoren verwaltet, die bestimmte erwartete Kontakte vollständig ignorieren. Infolgedessen wird der gesamte Pfad bis zum Kollisionspunkt als kollisionsfrei angesehen, was die Prozessintention möglicherweise nicht genau widerspiegelt.
Da diese Smart-Tip-ähnliche Funktionalität nicht verfügbar ist, müssen Benutzer für Prozesse wie Spot Welding einen Workaround verwenden: Versetzen Sie den finalen Schweißpunkt um 1 mm (oder eine kleine Clearance) vom Bauteil weg. Dadurch kann die Resolver-Engine den Roboterpfad bis zum gewünschten Approach-Punkt kollisionsfrei planen. Der Roboter bewegt sich an eine Position kurz vor dem tatsächlichen Kontakt, und das letzte Approach-Segment wird entweder separat behandelt oder als beabsichtigter Kontakt durch den Prozess akzeptiert.
Das Versetzen von Schweißpunkten ist notwendig, um Fehler bei der Pfadplanung zu vermeiden. Resolver respektiert die definierten Clearances und kann beim Import aus Visual Components Kollisionen nicht dynamisch nur im Moment des Kontakts zulassen.
In Resolver
Statt Kollisionen dauerhaft zu ignorieren, erlaubt die Engine Kollisionen dynamisch nur dann, wenn dies erforderlich ist – zum Beispiel im Moment des Schweißkontakts. Dies stellt sicher:
- Kollisionsfreie Bewegung bis zum Schweißpunkt
- Beabsichtigter Kontakt nur dann, wenn der Prozess ihn erfordert
Dieser Ansatz bietet realistischeres, adaptives Verhalten, ohne dass für jeden erwarteten Kontakt benutzerdefinierte Regeln erforderlich sind.