Study exportieren
Export vorbereiten
Angezeigte Objekte
Nur zum Exportzeitpunkt sichtbare (nicht ausgeblendete) Objekte und Roboter werden in die .zip aufgenommen.
Blenden Sie alle nicht erforderlichen Entitäten aus, um:
- Den Exportvorgang zu beschleunigen
- Exportfehler für nicht unterstützte Objekte zu vermeiden
Wenn ein Roboter sichtbar ist, aber keine zugeordnete Operation hat, wird eine Dummy-Operation mit zwei Targets in der aktuellen Pose exportiert. Dies hilft Resolver, den Roboter korrekt zu platzieren. Andernfalls wird der Roboter auf seine Nullstellung der Gelenke gesetzt, was Probleme bei der Planung verursachen kann.
Die korrekte Konfiguration von Collision Sets ist entscheidend. Diese werden in collision_rules in der project.yaml umgewandelt und in der Motion Planning von Resolver verwendet.
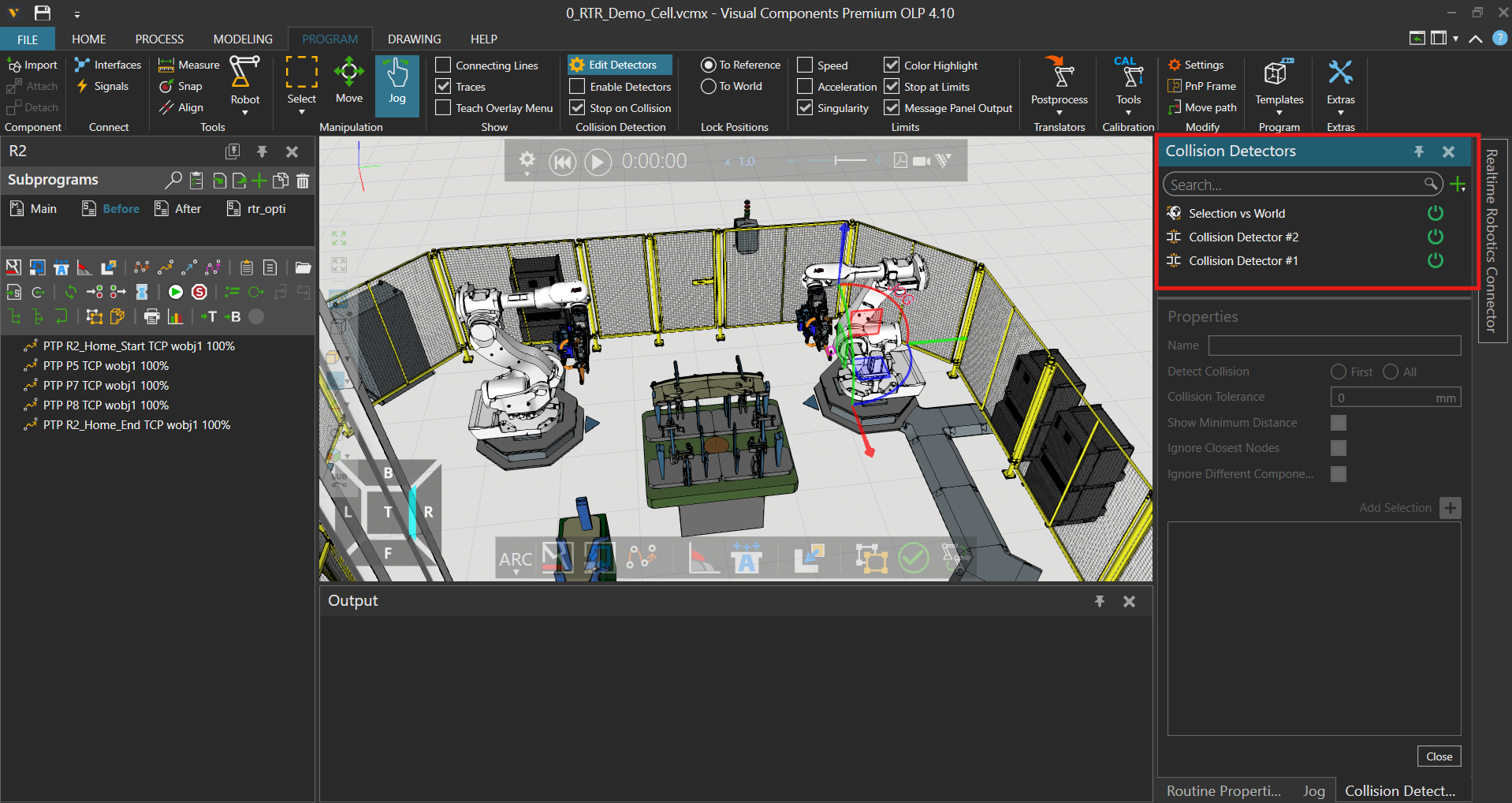
- Der Wert Collision Tolerance in Visual Components wird in eine
set_clearance-Regel übersetzt. - Dies ist eine „weiche“ Randbedingung: Resolver kann sie bei Bedarf verletzen, allerdings erhöht dies die Berechnungszeit erheblich.
Collision Rules werden in Visual Components noch nicht exportiert, dies wird aber in kommenden Releases erfolgen.
Best Practices:
- Verwenden Sie Collision Tolerance < 2 mm, wenn sich Process Points in der Nähe von Hindernissen befinden.
- Verwenden Sie größere Clearances (z. B. 5 mm+) für isolierte oder kritische Objekte (z. B. Säulen).
- Seien Sie konservativ – größere Toleranzen erhöhen die Komplexität der Pfadplanung stark. */}
Was wird exportiert?
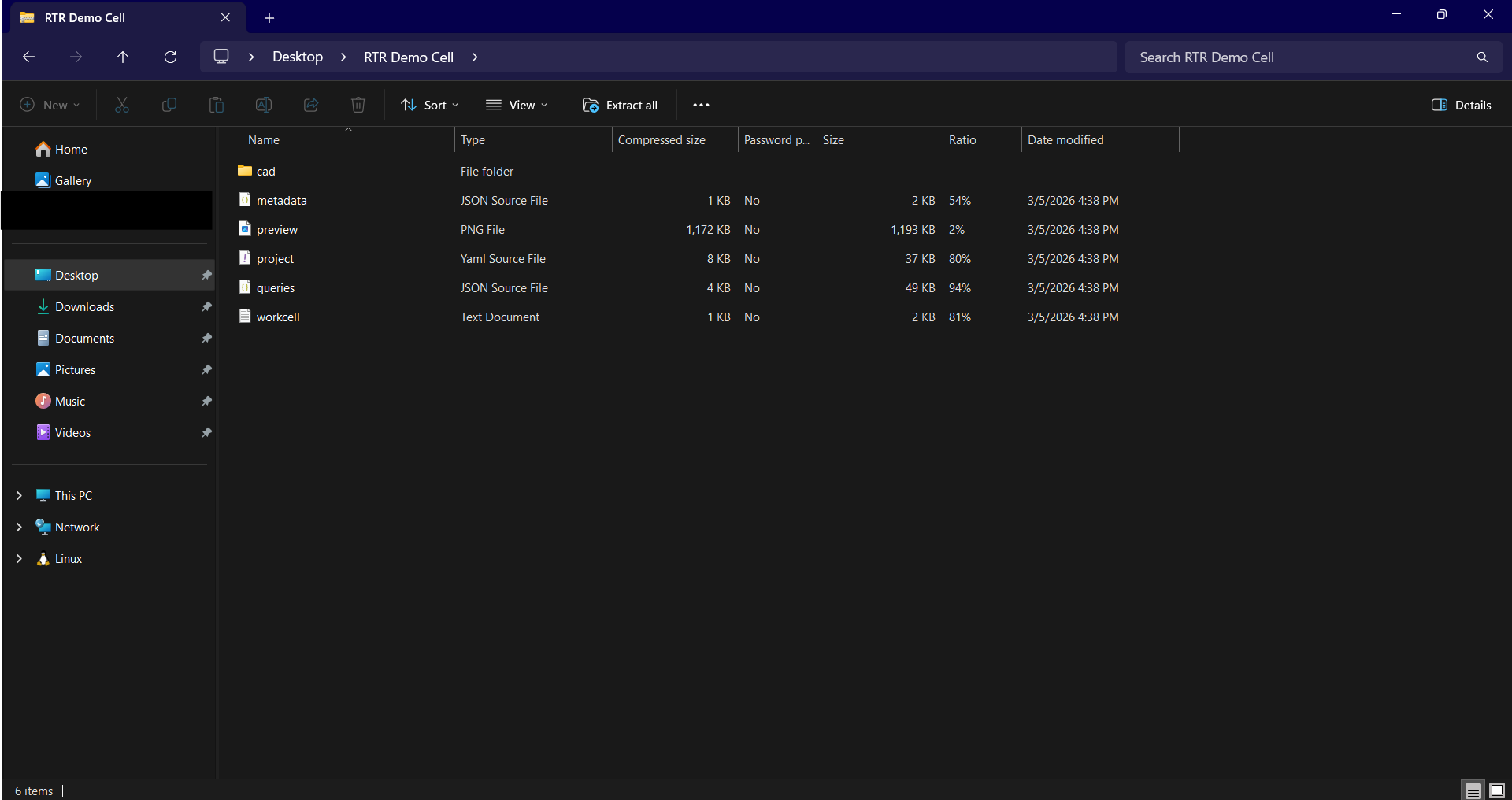
Beim Export einer Study wird eine .zip-Datei zur Verwendung mit der Resolver-Engine erzeugt. Dieses Archiv enthält die folgenden Dateien und Ordner:
| Datei / Ordner | Beschreibung |
|---|---|
project.yaml | Definiert, wie die Engine den Workcell aufbaut. Sie verweist auf alle Elemente in den Ordnern objects und robot_models und legt fest, wie Objekte positioniert und verbunden werden. Die vollständige Spezifikation wird in einem zukünftigen Release veröffentlicht. |
queries.json | Enthält die vom Exporter erzeugte Query – Operations, Targets und Precedence-Constraints. In der Resolver Cloud ist sie über die Build Workflow UI editierbar; über die API (Beta) wird sie als editierbarer Klartext angezeigt. |
metadata.json | Speichert Performance- und Study-Daten, die zur Verbesserung der Benutzererfahrung in zukünftigen Versionen verwendet werden. |
workcell.txt | Beschreibt die Joint-Hierarchie der Roboter in der Szene. |
logs.json | Protokolliert Daten zur Study und zum Exportprozess. |
cad/ | Enthält .mf-Dateien der Robotermodelle, die zusammen mit project.yaml zum Aufbau der virtuellen Robotermodelle und der Umgebungsobjekte verwendet werden. |
Unterstützte Anwendungen
- Spot Welding
- Arc Welding
- Riveting
- Inspection
- Material Handling
- Machine Tending
- Linear Rails
Weitere Anwendungen können auf Anfrage unterstützt werden. Wenn Ihr Anwendungsfall nicht aufgeführt ist, reichen Sie ein Support-Ticket ein, um sich mit einem RTR Application Engineer auszutauschen.
Sequenzen exportieren
Der Connector exportiert eine Sequenz (Operation) pro Roboter, und alle Sequenzen werden parallel ausgeführt. Stellen Sie beim Auswählen einer Sequenz für den Export Folgendes sicher:
- Alle Unterprogramm-Aufrufe oder zusätzlichen Sequenzen sind in der Hauptsequenz enthalten, die exportiert wird.
- Nur die erforderlichen Targets sind enthalten (z. B. Process Points oder essenzielle Vias).
- Sie drücken vor dem Export ⏮️ Reset – alle Roboter und Objekte müssen sich in ihren Startpositionen befinden.
- Die Target-Reihenfolge bleibt in den Ergebnissen erhalten.
Schritt für Schritt: Export aus Visual Components
- Navigieren Sie im Menü von Visual Components zum Realtime Robotics Connector. Es gibt zwei Möglichkeiten, das Projekt nach Resolver zu exportieren – Online und Offline:
- Online Export – Verwenden Sie diesen, wenn Ihr Simulations-PC über einen Internetzugang verfügt.
- Offline Export – Verwenden Sie diesen, wenn Ihr Simulations-PC keinen Internetzugang hat. Das Projekt wird lokal gespeichert und später in die Resolver Cloud übertragen.
Online Export
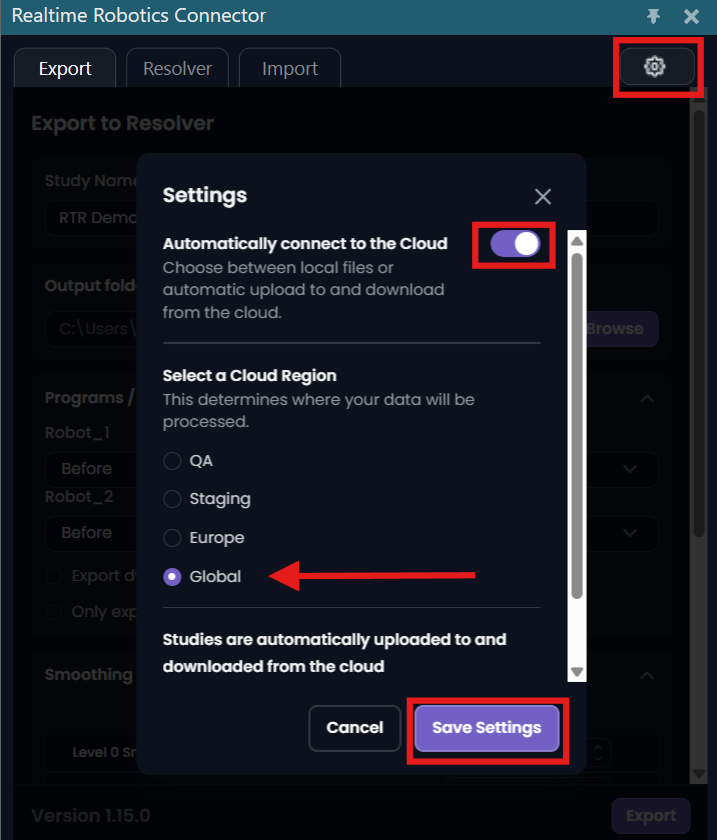
a. Klicken Sie im Tab Realtime Robotics Connector auf das Zahnrad-Symbol und öffnen Sie Settings. Stellen Sie sicher, dass Automatically connect to the Cloud aktiviert ist, und wählen Sie dann Ihre Region. Wenn Sie sich in Europa befinden, wählen Sie Europe; andernfalls wählen Sie Global. Klicken Sie auf Save Settings.
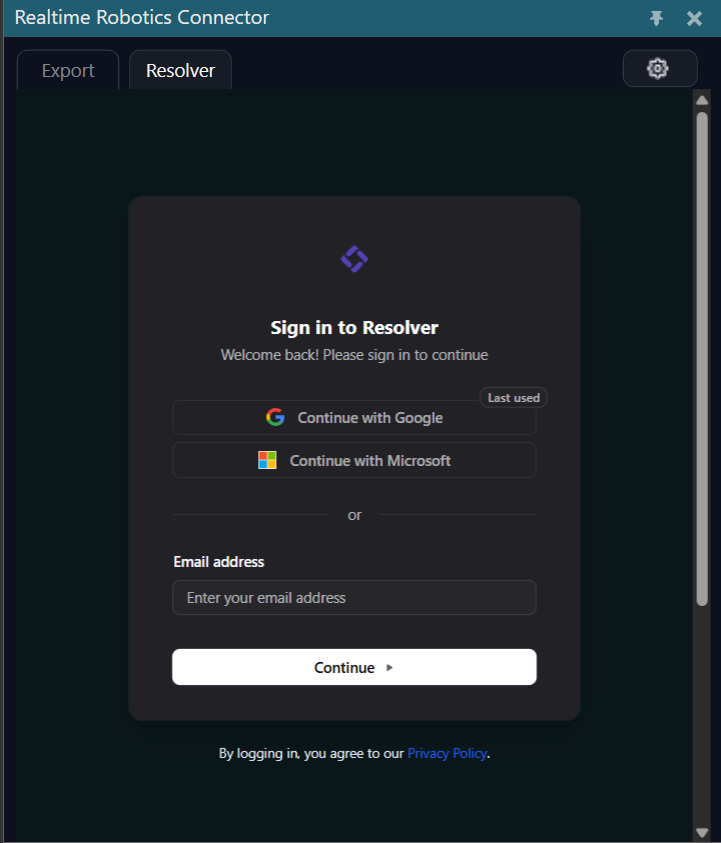
b. Sie werden in den Resolver-Tab weitergeleitet, wo Sie Ihre Resolver-Zugangsdaten eingeben müssen.
c. Geben Sie den Zielordner/Pfad an, wählen Sie die Sequenzen, die Resolver für jeden Roboter optimieren soll, und klicken Sie auf Export.
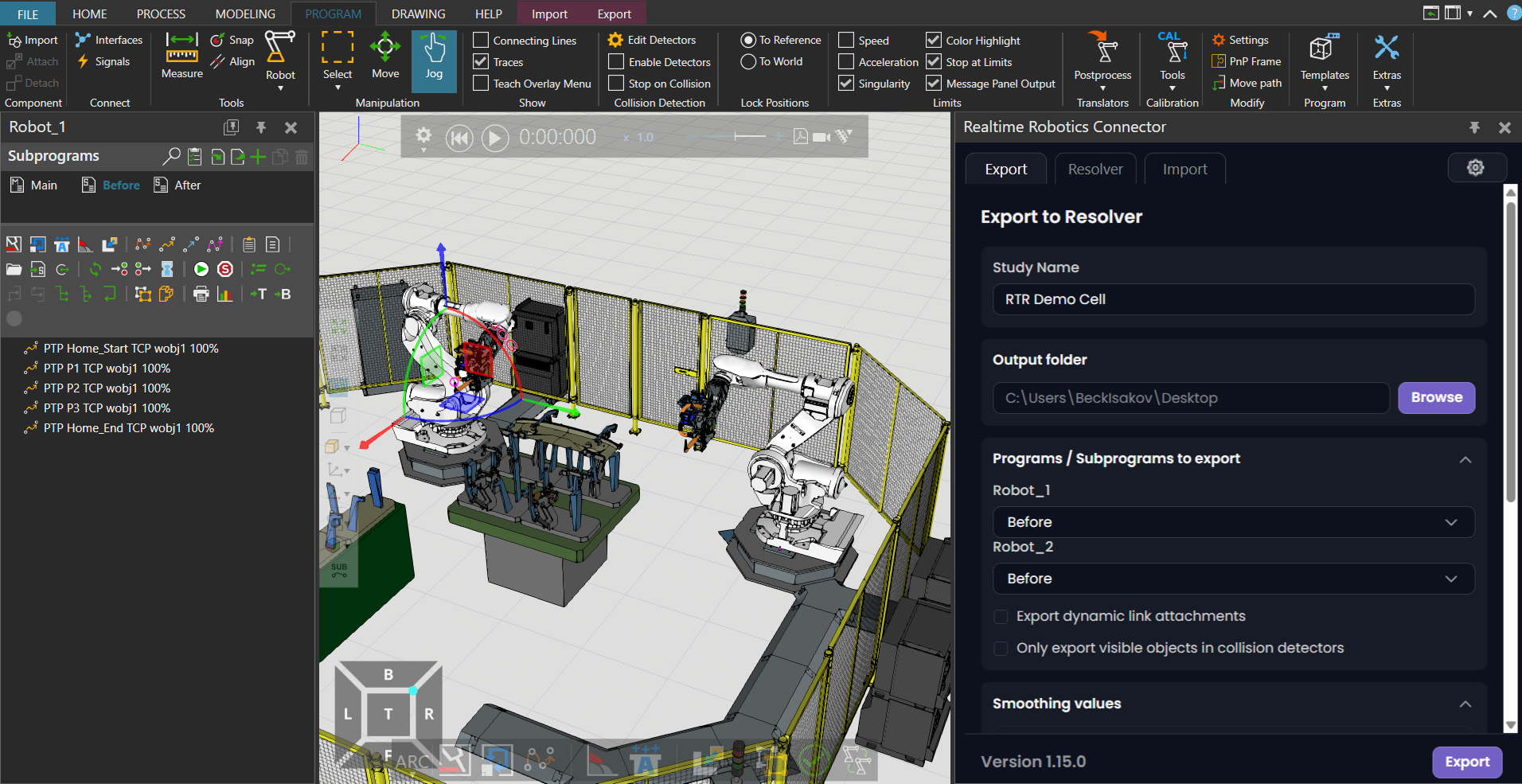
Offline Export
Stellen Sie im Panel Settings sicher, dass Automatically Connect to the Cloud deaktiviert ist. Gehen Sie anschließend zu Export → Subprograms to export und wählen Sie die Sequenz(en) für jeden Roboter aus.
-
Wählen Sie den Ausgabeordner-Pfad, in dem das gezippte Projekt lokal gespeichert werden soll:
- Geben Sie im Feld Study Name einen Namen ein (dieser wird als Dateiname der
.zipverwendet). - Wählen Sie die Sequenzen für jeden Roboter aus.
- Geben Sie im Feld Study Name einen Namen ein (dieser wird als Dateiname der
-
Klicken Sie auf Export.
- Beobachten Sie das Output- oder Status-Panel des Connectors, um den Fortschritt zu verfolgen. Die Exportzeit variiert je nach Zellgröße.
- Bei Erfolg sehen Sie eine Meldung wie:
Created Zip file :\Path\To\Your\File.zip
Sobald der Export abgeschlossen ist, laden Sie die .zip-Datei in die Resolver Cloud hoch, um die Verarbeitung zu starten.