Konfigurieren
Studies
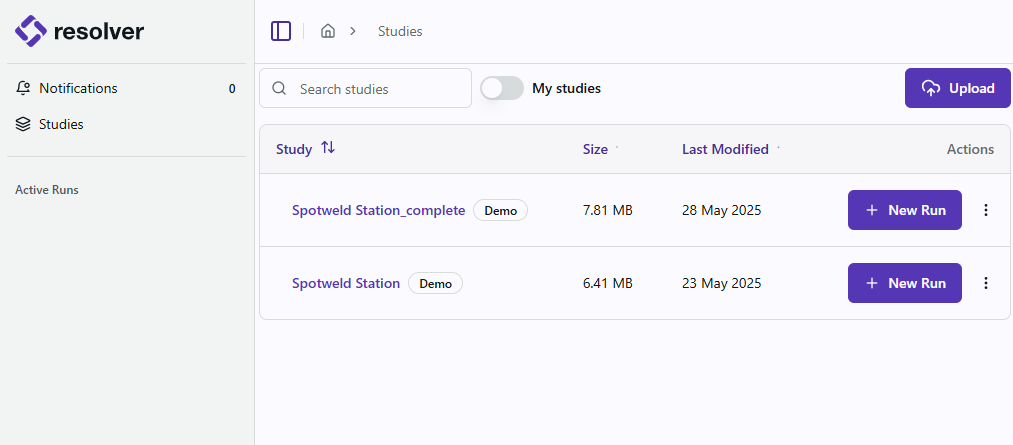
Sobald Sie angemeldet sind, werden Sie zur Studies-Seite weitergeleitet, auf der alle von Ihrem Unternehmen hochgeladenen Studies angezeigt werden.
Einen Run konfigurieren
-
Klicken Sie bei der Study, für die Sie einen Run starten möchten, auf die Schaltfläche
+ New Run. -
Sie gelangen zur Konfigurationsauswahlseite. Wird diese Seite nicht angezeigt, wurde für Sie bereits die Standardoption Build ausgewählt und Sie können zum nächsten Schritt springen.
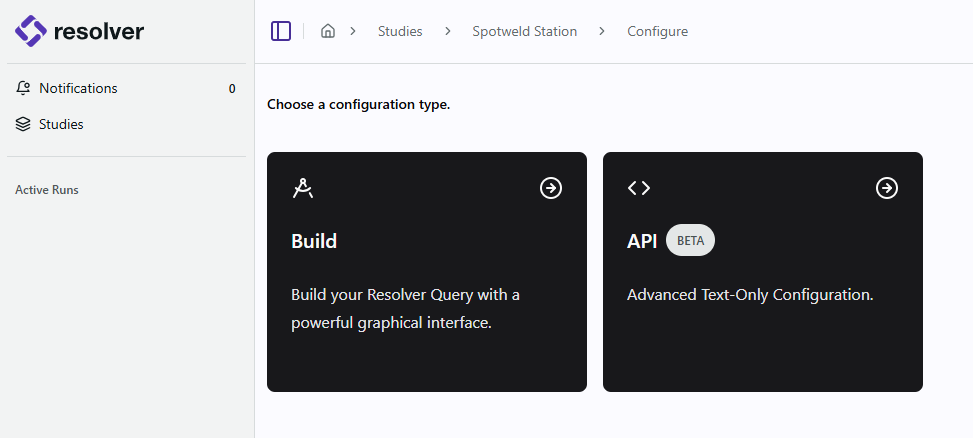
Hinweis: Die Option API ist ein fortgeschrittener Workflow, der ein Verständnis der queries.json-Datei erfordert, da dazu keine Benutzeroberfläche gehört. Diese Option steht lediglich dafür zur Verfügung, Beta-Features zu aktivieren, die noch keine UI haben. Dieses Vorgehen folgt ab diesem Punkt dem standardmäßigen Build-Workflow. Wenden Sie sich bitte an Ihren RTR Applications Engineer, um den API-Workflow zu nutzen.
-
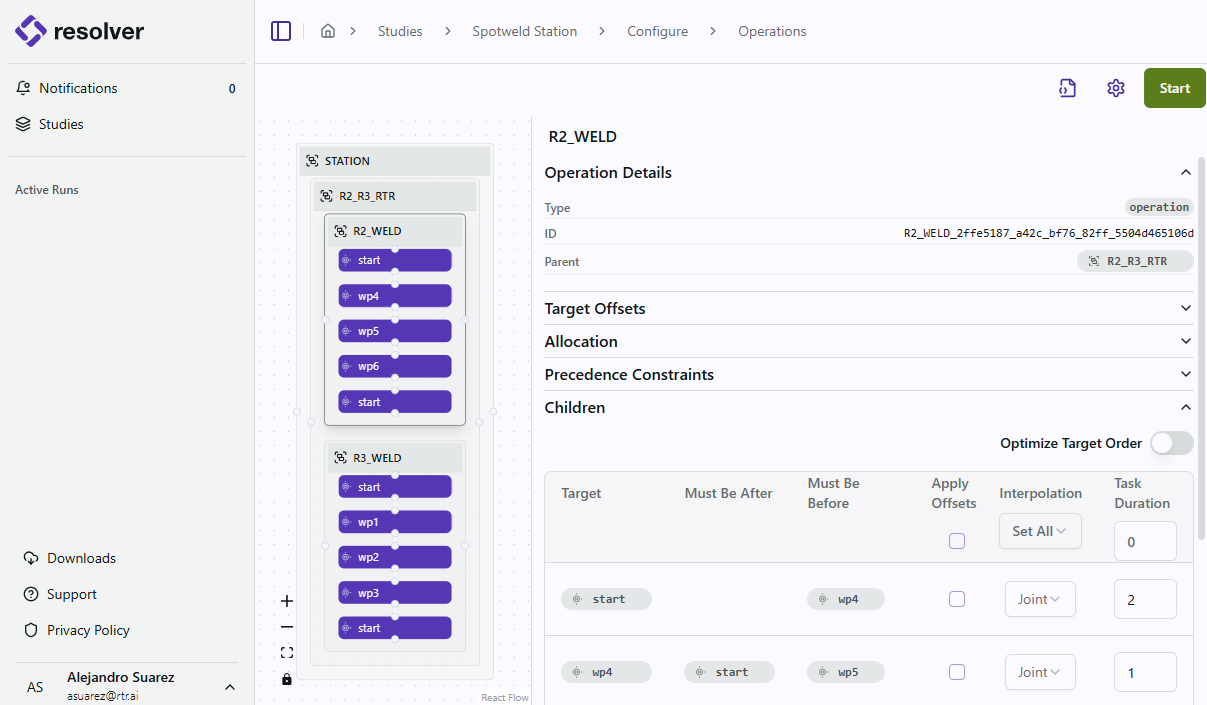
Sie sehen eine Liste der über den Connector exportierten Sequenzen. Auf dieser Seite gibt es einige zusätzliche Konfigurationseinstellungen, die der Benutzer auswählen kann:
Target Offsets
Fügen Sie Target Offsets hinzu, um einen X-, Y- oder Z-Offset mit externen Achsenwerten festzulegen und auf beliebig viele oder alle Punkte anzuwenden. Resolver verwendet die Offsets bei der Pfadplanung und beim Generieren von Interlocks als Annäherungs- und Rückzugspunkte.
Allocation
Wenn in einer Mehrroboter-Anwendung mehr als ein Roboter dieselbe Aufgabe ausführen kann, geben Sie Resolver an, welche Roboter für diese Operation in Betracht gezogen werden dürfen. Resolver berücksichtigt alle ausgewählten Roboter und bewertet Reachability, Pfade und Interlocks, um die optimale Target-zu-Roboter-Zuweisung zu ermitteln. Bitte beachten Sie, dass diese Funktion die Anzahl möglicher Lösungen vergrößert und Resolver daher länger laufen sollte.
Precedence Constraints
Zeigt die Aktionen oder Operationen an, die nach der ausgewählten Operation beginnen oder vor ihr abgeschlossen sein müssen. Precedence Constraints werden vom Connector anhand der Informationen aus dem Simulationstool erzeugt. Siehe
Children
Wird eine übergeordnete oder zusammengesetzte Operation ausgewählt, werden alle untergeordneten Operationen aufgelistet. Wird eine Operation mit Targets ausgewählt, wird die Liste aller Targets für diese spezifische Operation angezeigt.
Interpolation
Die Spalte Interpolation steuert, wie die EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... Bewegungspfade zu und von Prozesspunkten interpoliert. Folgende Optionen stehen zur Verfügung:
-
Joint: Der Roboter bewegt jedes Joint entlang des kürzesten Pfades im Joint-Raum, um das Target zu erreichen. Dies ist der schnellste Interpolationsmodus und ist die Voreinstellung. Joint-Bewegungen können für Menschen weniger vorhersehbar wirken, weil der TCP keiner geraden Linie folgt, sie maximieren jedoch die Zykluszeit-Performance.
-
Linear: Der Roboter bewegt den TCP entlang einer Geraden im kartesischen Raum zwischen den Wegpunkten. Lineare Bewegungen sind langsamer als Joint-Bewegungen, erzeugen aber vorhersehbare, für Menschen lesbare Pfade, die bei der Inbetriebnahme leichter angepasst werden können. Resolver fällt bei linear spezifizierten Bewegungen, die aufgrund von Joint-Limitierungen oder Singularitätserkennung nicht erzeugt werden können, auf Joint-Interpolation zurück.
-
Hybrid: Wechselt intelligent zwischen Joint- und Linear-Interpolation, basierend auf der Nähe zu Prozesspunkten. Diese Option wird über ein Feature-Flag für die Organisation in Resolver aktiviert – wenn Sie sie erwarten, aber nicht sehen, wenden Sie sich an den RTR Support.
-
Was ist hybride Interpolation?
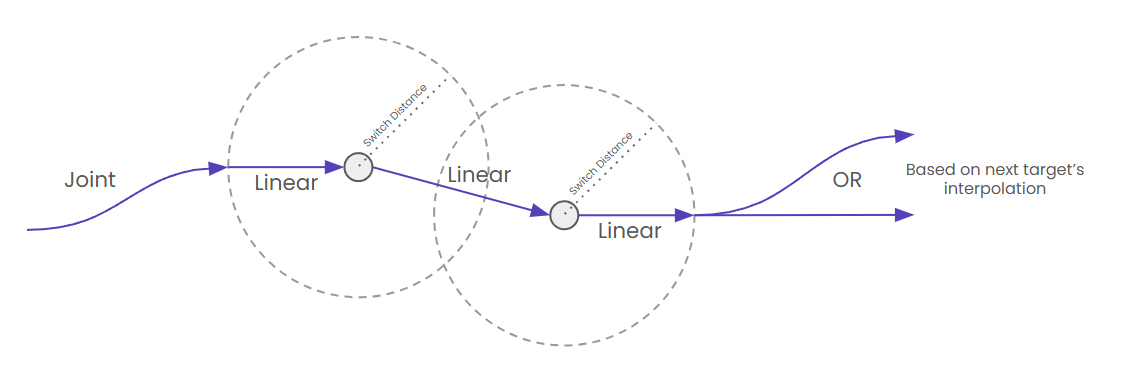
Die hybride Interpolation ist ein Modus der Trajektorienplanung, der intelligent zwischen Joint- und Linear-Interpolation umschaltet, abhängig von der Nähe zu Target-Wegpunkten. Sie kombiniert hohe Geschwindigkeit durch Joint-Bewegungen bei großen Entfernungen mit der Kontrolle und für Menschen bevorzugten Linearbewegungen in der Nähe der Prozesspunkte.
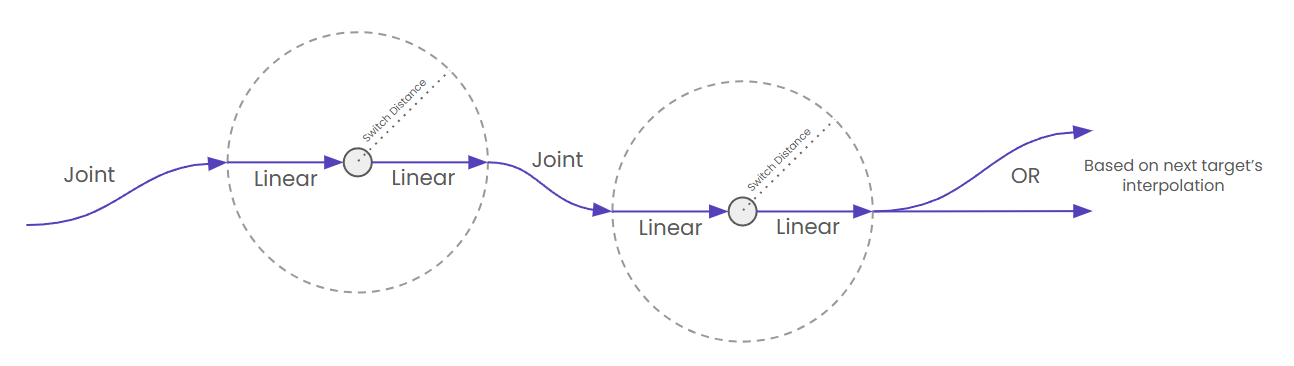
Die EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... wechselt den Interpolationstyp, je nachdem, ob Pfade außerhalb oder innerhalb einer Zone um den Prozesspunkt erzeugt werden:
- Außerhalb der Umschaltzone: Verwendet Joint-Interpolation für den schnellsten Pfad und maximale Zykluszeit-Performance.
- Innerhalb der Umschaltzone: Wechselt zu Linear-Interpolation für kontrollierte Bewegungen, die bei der Inbetriebnahme leichter von Menschen angepasst werden können.
Die Entfernungsschwelle, die bestimmt, wann zwischen den Modi umgeschaltet wird, heißt Switch Distance.
HinweisResolver fällt bei linear spezifizierten Bewegungen, die aufgrund von Joint-Limitierungen oder Singularitätserkennung nicht erzeugt werden können, auf Joint-Interpolation zurück. Das gilt für alle geplanten linearen Bewegungen, unabhängig von der Hybrid-Kennzeichnung.
-
Hybride Interpolation für Punktschweißen
Das Verhalten der hybriden Interpolation hängt vom Abstand zwischen den Schweißpunkten ab:
-
Nicht überlappende Switch Distances: Wenn die Prozesspunkte so weit auseinander liegen, dass sich ihre Switch-Distance-Zonen nicht überlappen, verwendet das System für die Transit-Segmente Joint-Interpolation, sofern dies zu einem schnelleren Pfad führt. So kann der Roboter die Geschwindigkeitsvorteile der Joint-Interpolation bei längeren Transitbewegungen zwischen Prozesspunkten nutzen.
-
Überlappende Switch Distances: Wenn die Prozesspunkte so nah beieinander liegen, dass sich ihre Switch-Distance-Blasen überlappen, bleibt die Interpolation während der gesamten Via-Bewegung Linear. So wird eine konsistente, präzise Bewegung bei eng benachbarten Prozesspunkten sichergestellt und die Vorteile der Linear-Interpolation bleiben über das gesamte Pfadsegment erhalten.
-
-
Hybrid-Parameter
Nach Auswahl der Hybrid-Option können die folgenden Parameter angepasst werden:
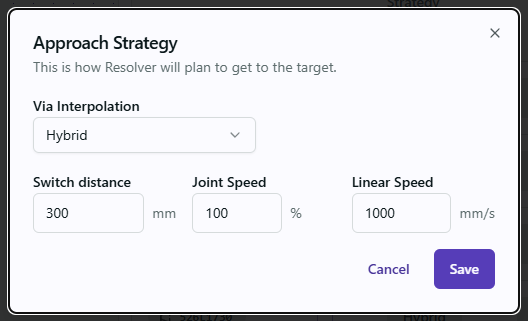
- Switch Distance: Der Radius der Zone um den Prozesspunkt, in der die EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... von schnellen Joint-Bewegungen zu geschwindigkeitsbegrenzten linearen Bewegungen wechselt.
- Joint Speed: Maximale Geschwindigkeit der generierten Vias außerhalb der Switch-Zone. Es wird dringend empfohlen, diesen Wert auf 100 % zu belassen.
- Linear Speed: Maximale Geschwindigkeit der generierten Vias innerhalb der Switch-Zone.
-
Optimize Target Order
Die Engine optimiert die Sequenz, indem sie die Neuanordnung der Targets zulässt, mit Ausnahme des ersten und letzten Targets, die als erforderliche Start- und Endpunkte festgelegt bleiben. Alle weiteren Targets dazwischen können neu angeordnet werden, wenn die Engine feststellt, dass eine andere Reihenfolge die Zykluszeit verbessert.
Task Duration
Die Task-Zeit entspricht einer "Wartezeit" an jedem Target. Beim Punktschweißen sollte dies die Zeit sein, die ein Schweißpunkt benötigt. Bei Bedarf können Benutzer die Task-Duration-Werte für jedes Target in der Sequenz manuell anpassen.
-
-
Wählen Sie ⚙ View Query Settings in der oberen rechten Ecke der Seite, um die Einstellungen zu ändern. Die folgenden Query-Einstellungen stehen zur Verfügung:
Motion Settings
Avoid Other Robots' Home Positions
Diese Einstellung stellt sicher, dass die für einen Roboter erzeugten Bewegungspfade nicht mit dem ersten und letzten Target ("Home"-Targets) anderer Roboter kollidieren. Wenn jedoch kein möglicher Pfad existiert, der diese Regel einhält, können die Ergebnisse Regelverletzungen oder Kollisionen enthalten oder keine Lösung finden. Es ist daher entscheidend, dass Benutzer bei Aktivierung dieser Option sicherstellen, dass die Home-Targets deutlich außerhalb des Bewegungspfads der anderen Roboter liegen.
Enable Smoothing
Verwenden Sie diese Einstellung, um für generierte Via-Punkte einen Smoothing-Wert ungleich null zuzulassen. Wenn aktiviert, versucht die Engine, einen der Werte im Abschnitt
smoothing_tablesder Datei queries.json zu verwenden. Die Engine optimiert die Via-Anzahl und die Smoothing-Werte, um die beste Zykluszeit zu erzielen. Die Targets in der Sequenzliste (Prozesspunkte) erhalten diese Smoothing-Werte nicht.End Conditions
Convergence
Mit diesen beiden Einstellungen kann ein Benutzer konfigurieren, wann die Engine Konvergenz zu einer Lösung erreicht hat. Die Werte sollten es der Engine erlauben, die aktuelle Lösung über einen angemessenen Zeitraum hinweg zu verbessern, ohne unbegrenzt zu laufen. Im Wesentlichen gibt es einen "Timer", der beim Start des Runs zu laufen beginnt. Das Verhalten dieses Timers kann mit den folgenden Einstellungen angepasst werden.
- Improvement Threshold (s): Die minimale Verbesserung der Zykluszeit, die als Fortschritt gewertet wird. Wird diese Schwelle überschritten, wird der "Timer" auf null zurückgesetzt und beginnt erneut.
- Time Threshold (s): Die maximale Laufzeit des "Timers". Wird dieser Wert erreicht, gilt der Run als konvergiert und wird automatisch abgeschlossen.
Elapsed Time
- Time Threshold (s): Eine maximale Laufzeit, die der Run haben darf, unabhängig vom Konvergenz-Timer.
-
Wählen Sie nach Abschluss der Konfiguration oben rechts die Schaltfläche Start. An diesem Punkt wird eine Lizenz ausgecheckt und ein Server in der Cloud bereitgestellt.