2025.01.09 Release

新年あけましておめでとうございます!
2025年、Resolverの年に期待を寄せています。5月12日にデトロイトのAutomateでResolverを正式にローンチし、6月24日にはミュンヘンのAutomaticaにも出展いたします。
今年は非常にエキサイティングな新機能と新しい能力を予定しています。皆様の貴重なフィードバックに基づきロードマップを調整いたしました。
Resolverを高速、簡単、柔軟、かつ強力なものにし続けるために、引き続きご協力いただきありがとうございます。
Resolver アップデート
本日のアップデート:
- 簡単なアンケート
- 新しいユーザードキュメント
- ターゲット順序の最適化
- 中間結果のダウンロード
- カスタムリニアレール位置
- PS Connector 0.7.0-betaリリース
簡単なアンケート
3分以内で完了します
この短いアンケートにご回答いただき、最も重要なニーズに合わせたロードマップ策定にご協力ください。よろしくお願いいたします!
新しいユーザードキュメント
詳しくはこちらをご覧ください!
resolver.rtr.ai/docsでResolverのドキュメントにアクセスできるようになりました。
製品の急速な開発に合わせて、ドキュメントを継続的に更新してまいります。
動画やその他のベストプラクティスにもご注目ください。
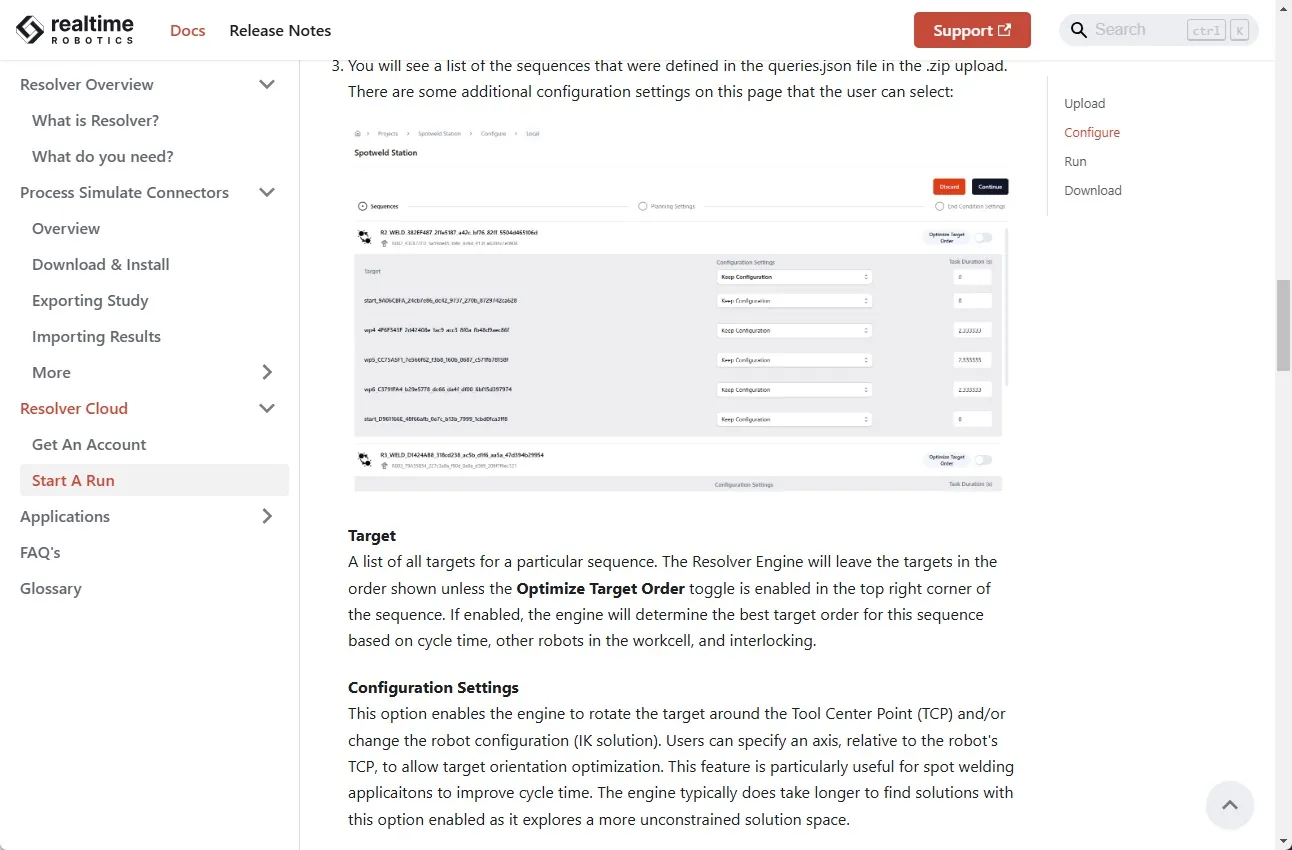
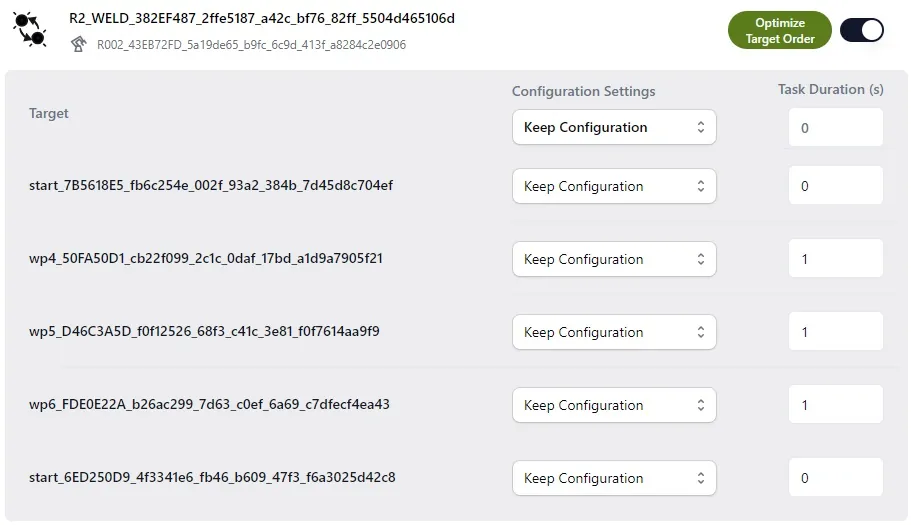
ターゲット順序の最適化
最適な順序を数分で見つけます
プロセスターゲットを任意の順序で訪問できる柔軟性がある場合、
「ターゲット順序を最適化」を有効にすることで、すべてのターゲットを最短サイクルタイムで訪問するパスを生成できます。
このオプションを無効のままにすると、指定された順序(上から下)でターゲットを訪問するパスが生成されます。
時間の節約になるかわからない場合は、ぜひお試しいただき、結果をお知らせください!
中間結果のダウンロード
実行中の進捗状況を確認できるようになりました!
エンジニアリングチームがここ数ヶ月間取り組み、実行を停止せずに中間結果をダウンロードできるようになりました。
実行を開始した後、シミュレーションソフトウェアにインポートできる「現在の結果を取得」が利用可能になります。
実行を終了して最新の結果を取得する場合は、ドロップダウンメニューから「結果を確定して停止」を選択してください。

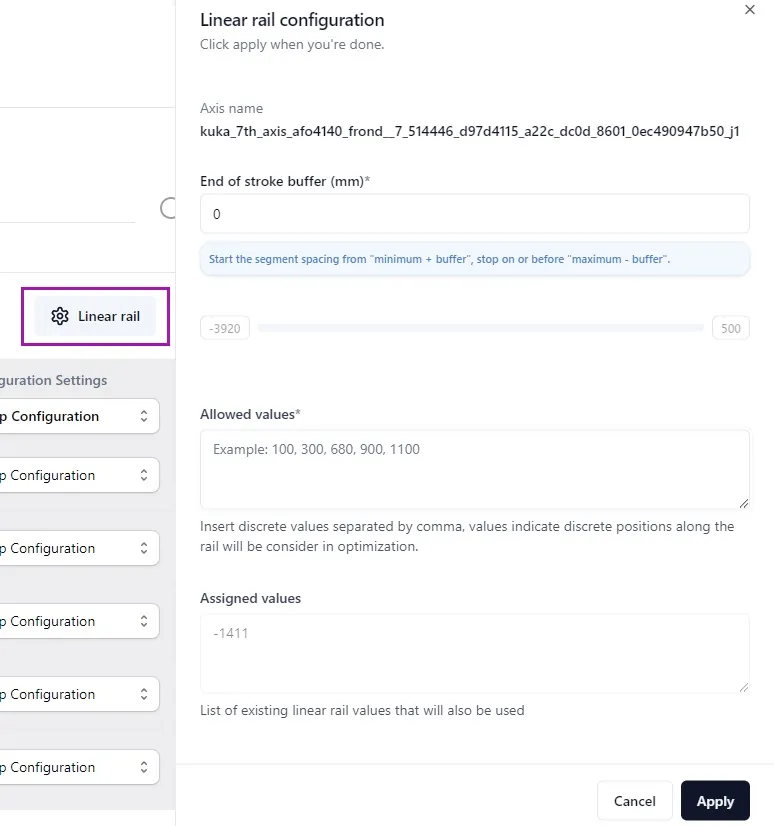
カスタムリニアレール位置
より多くの制御のための柔軟性を追加
外部RTUまたはリニアレール上の各ロボットについて、Resolverが最適な動作パスとインターロックを見つけるために使用する位置を指定できるようになりました。
最小値と最大値のストロークバッファを追加することもできます。
なお、ロボットが特定のターゲットで位置または構成を持っている場合、
外部軸の値はオプションの1つとして使用され、「割り当てられた値」に表示されます。
PS Connector
Version 0.7.0-beta
RTR FileShareのOptimized Path Planning Betaフォルダから最新バージョンをダウンロードしてください。
PS 0.7.0-beta
- エクスポート時にサポートされていないデバイスキネマティクスが検出された場合のエラーメッセージを追加
- エクスポート時の衝突セット不足に関する警告メッセージを追加
- エクスポート時のロボットダイナミクスのチェックを追加し、異常なダイナミクスについてユーザーに通知
- ネストされた階層のガンチップがクリアランスルールに含まれていなかった問題を修正
- 特定のパーツの外観が正しくエクスポートされなかった問題を修正