2025年1月30日リリース
· 約3分

Resolver アップデート
皆様からご要望いただいた機能の提供に向けて、引き続き大きな進歩を遂げています。 今回の最新リリースでは、ロボット、ガン、レールの複雑なキネマティクス処理を大幅に改善しました。 キネマティックループを持つX型ガンの完全サポートが可能になったほか、これまで対応できなかった多くのシナリオにも対応できるようになりましたことをお知らせいたします。
本日のアップデート:
- PS Connector 0.9.0-beta リリース
- 簡単なアンケート
- ユーザードキュメント
PS Connector
X型ガンおよびPS 2307の完全サポートを追加
RTR FileShareのOptimized Path Planning Betaフォルダから最新バージョンをダウンロードしてください。
PS 0.9.0-beta
- 4ジョイントのキネマティックループを持つX型ガンの完全サポートを追加
- Process Simulate 2307のサポートを追加
- ロボット、ガン、レールの複雑なキネマティクス処理を改善
- インポーターでOLPコマンドにおける重複するロボット/デバイス/コンポーネント名のサポートを追加
- インポーターでより多くのガンタイプのサポートを追加
- エクスポート時にSwept Volumeなどのより多くのジオメトリタイプのサポートを追加
- オペレーションのないロボットを現在のポーズで静的オブジェクトとしてエクスポート。ダミーオペレーションの必要性がなくなり、固定されたマテリアルハンドリングポーズでのエアウェルディング検討が可能になります。
- エクスポーターおよびインポーターの複数の修正
簡単なアンケート
所要時間は3分未満です
この簡単なアンケートにご回答いただき、皆様の最も重要なニーズに合わせたロードマップの策定にご協力ください。よろしくお願いいたします。
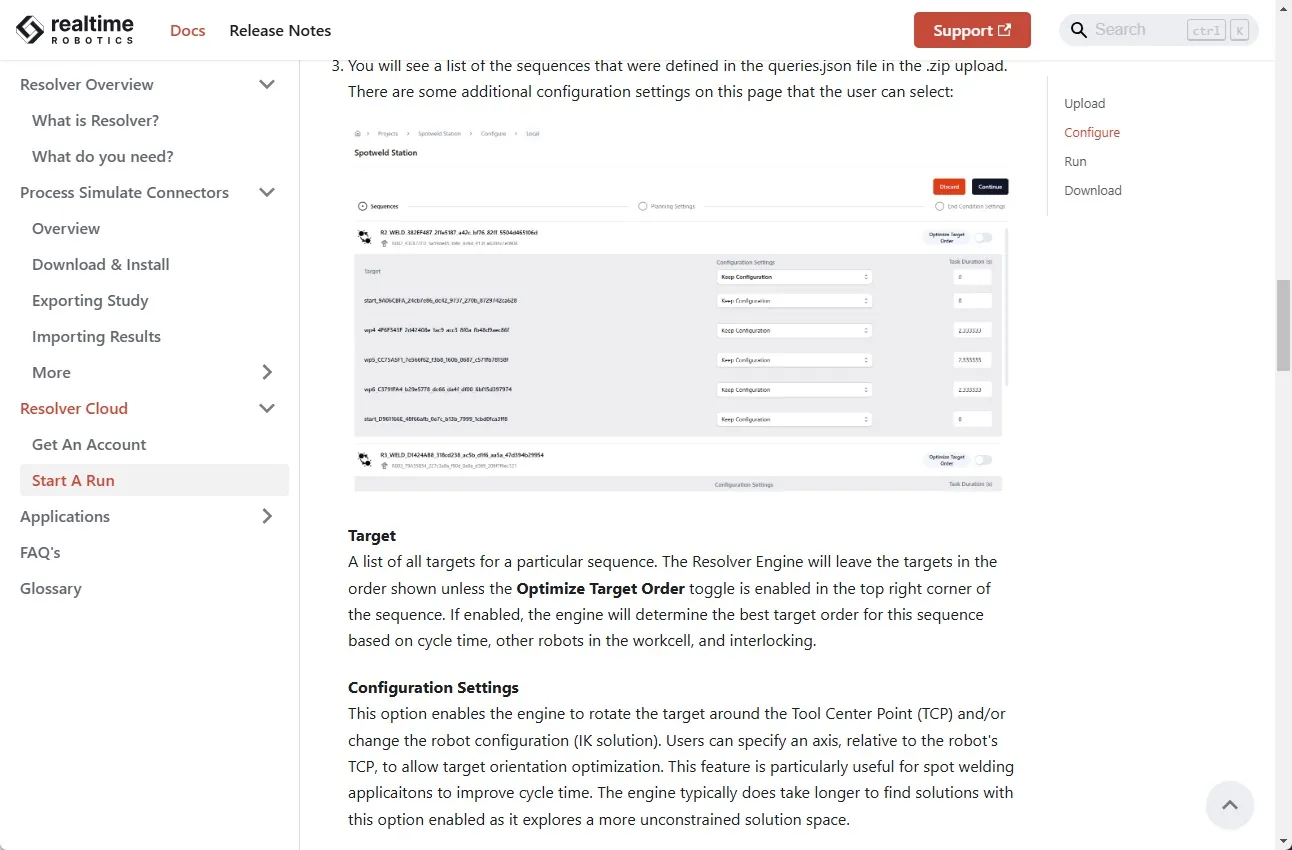
ユーザードキュメント
継続的に更新中
resolver.rtr.ai/docsからResolver ドキュメントにアクセスできるようになりました。
製品の急速な開発に合わせて、ドキュメントを継続的に更新してまいります。
動画やその他のベストプラクティスもぜひご確認ください。