2025年3月11日リリース

Resolver アップデート
Resolverの PS Connectorのアップグレードをご紹介いたします。動作生成におけるスムージング値の選択が強化されました。 同時に、皆様からの貴重なフィードバックに基づき、改善が必要な領域があることを認識しています。 以下では、現在の課題と、それに対する取り組みについてお伝えいたします。
本日のアップデート:
- 取り組んでいる課題
- ロボットベンダー固有のスムージング
- PS Connector 0.10.0-beta リリース
取り組んでいる課題
一部の機能のパフォーマンスが当社の基準に達していません
エンジニアリング時間の短縮に役立つ新しい機能を迅速にお届けする中で、
一部の機能が皆様の期待する価値を提供できていない状況があります。
そのため、以下の分野で大幅な改善に取り組んでいることをお知らせいたします:
インポート時のオートチューニング
問題: RCSを使用したインポート時のオートチューニングに数分から数時間かかることがあります。
対応中の内容: インポートコードの高速化、ファストおよびオプティマルチューニングオプションの導入、シミュレーション時間間隔のユーザー設定を可能にする作業を進めています。これらの機能は近日中にご利用いただける予定です。
お客様への影響:
- RCSなしでシミュレーションを行う場合は、オートチューニングをご利用ください。数分で完了します。
- RCSを使用する場合、オートチューニングに数時間かかる可能性があることをご了承ください。短期的には、オートチューニングなしでインポートし、衝突を手動で修正することも可能です。
ロボットの自己衝突
問題: ロボットおよびアタッチメントの自己衝突が報告されています。この問題の原因は、衝突ルールが定義されていないことです。例として、1) 溶接ガンとロボット間の衝突、
2) 溶接ガンとRTU間の衝突があります。詳細については、ドキュメントのCollision Rulesセクションをご参照ください。
対応中の内容: ワークフローを簡素化し、期待される衝突セットを検証するためのさまざまなオプションを検討しています。
お客様への影響:
- ロボットリンクとロボットに取り付けられたすべてのアタッチメント間の衝突セットが定義されていることを確認してください。
Rx、Ry、またはRzでのツール構成の最適化
問題: Rz最適化機能は、ターゲットにロボットとパーツの衝突がある場合、スポット溶接アプリケーションで最適でない結果を生成しています。これは、エンジンがガンチップを無視できることを現在認識していないために頻繁に発生します。ターゲットでのガンチップの衝突無視ルールのエンコードは既に行われていますが、エンジン側の作業がまだ残っています。
対応中の内容: TCP方向最適化時にガンチップが適切に定義され、エンジンで処理されるまで、この機能を近日中に無効にする予定です。
お客様への影響:
- ツール回転を最適化する機会がある場合は、「Rx、RyまたはRzの最適化」を有効にした場合と無効にした場合の両方でお試しください。
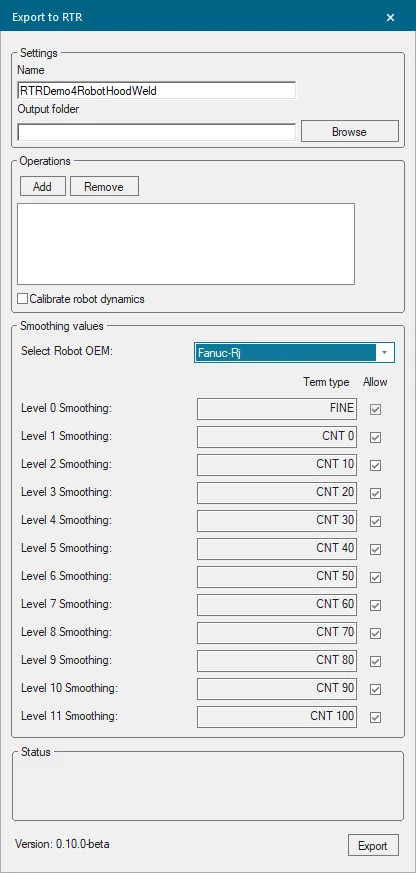
ロボットベンダー固有のスムージング
以前は、ユーザーは5(mm)のスムージング値のみを指定できました。今回、すべてのロボット固有のスムージングオプションをデフォルトでサポートするように拡張し、より高い柔軟性と制御性を提供します。不要なオプションの選択を解除するだけです!
ご注意ください:FINEオプションは、新しく生成されたViaロケーションでのインターロックに必要なため、チェックを外すことができません。
この改善は皆様のフィードバックによって実現しました。ユーザーリクエストを形にできることを大変嬉しく思います。ぜひご意見をお聞かせください!
PS Connector
新しいコントローラー固有のスムージング値
RTR FileShareのOptimized Path Planning Betaフォルダから最新バージョンをダウンロードしてください。
PS 0.10.0-beta
- エクスポーターにロボットベンダー固有のスムージング値を追加。
- エクスポートおよびインポートの診断データのログ記録を追加。
- 固定ツール、大きなジョイント制限値等に関する追加の警告。
- インターロック、ターゲットロケーション、スムージング変換のバグ修正。