2025年3月28日リリース

Resolver アップデート
前回のアップデートでは、取り組んでいるいくつかの課題を共有しました。 インポート時のスムージング値のオートチューニングを大幅に改善したことをお知らせいたします。 また、個々のロボットが割り当てられたターゲットに到達する能力を詳述する、ダウンロード可能な到達性レポートもリリースいたしました。
本日のアップデート:
- インポート時のオートチューニング
- 到達性レポート
- PS Connector 0.11.0-beta リリース
インポート時のオートチューニング
スムージングのオートチューニングが数分で完了!
前回のリリースでは、インポート中のスムージングパラメータのオートチューニングにおけるパフォーマンスの制限を認識していることをお伝えしました。
それ以来、チームは精力的に取り組んでまいりました。その成果をご紹介いたします。
本リリースでは、API効率の大幅な改善と、2つの強力な新しいインポートモード(FASTおよびOPTIMAL)を導入いたします。
FASTモード
スピードが必要ですか?FASTモードは、選択したロボットOEMに合わせたデフォルトの変換値を使用して、パスを素早くインポートします。 スクレイピング衝突が検出された場合、FINEスムージングレベルにインテリジェントに調整します。 このモードは、スピードを優先する迅速な検証に最適です。ただし、衝突が多いシナリオでは、スムージングが理想的でない場合があることにご注意ください。
OPTIMALモード
精度をお求めですか?OPTIMALモードは、Resolver Engineを通じて提供される、許可された値に基づいて 各Viaポイントに対して可能な限り高いスムージング値を見つけるための詳細な分析を実行します。 APIインタラクションをバックグラウンドで根本的に再設計し、最高品質のパススムージングを提供しながら最適化時間を大幅に短縮しました。 所要時間はViaごとのスムージングオプション数に応じてスケーリングしますが、結果は一目瞭然です: 超スムーズなOEM最適化パスをお届けします。

🎁 RolandとRicoのためにソリューションを提供
到達性レポート
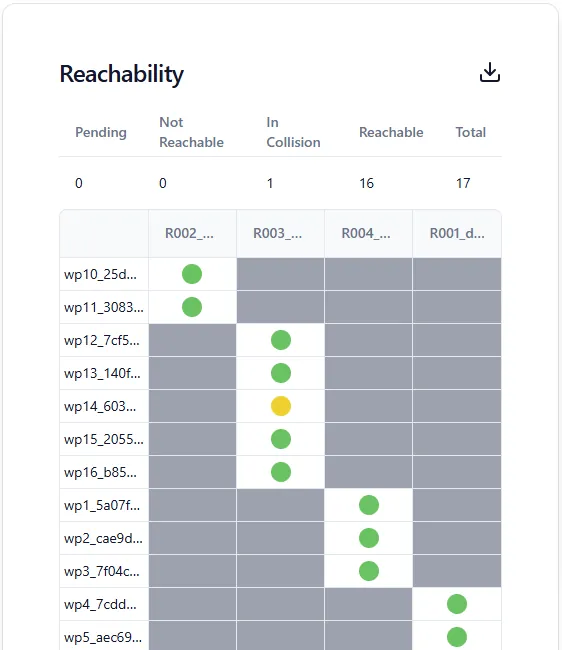
すべてのターゲットの到達性を素早く確認し、レポートをダウンロード ロボットを各ターゲットに手動で移動させる方法では、限られた到達性情報しか得られず、非常に退屈な作業です。Resolverに到達性チェックを任せることで、大幅なエンジニアリング時間を節約できます。Resolverは、実際の動作経路を生成することにより、ロボットが割り当てられたターゲットに到達できるかどうかを確認します。数分で情報を見やすいテーブルにまとめ、CSV形式でダウンロードして、計画やエンジニアリングプロセスで活用いただけます。
テーブルに表示されるさまざまな状態は以下の通りです:
- 保留中(砂時計):エンジンが到達性を計算中です。
- 到達不可(赤):ターゲットに到達できません。
- 衝突あり(黄):ターゲットに到達可能ですが、衝突を伴います。
- 到達可能(緑):衝突なしでターゲットに到達可能です。
🎁 Davidのためにソリューションを提供
PS Connector
オートチューンの改善
RTR FileShareのOptimized Path Planning Betaフォルダから最新バージョンをダウンロードしてください。
PS 0.11.0-beta
- オートチューンの改善と2つのモード(FASTモードおよびOPTIMALモード)の追加
- 管理者権限がなくても、現在のユーザーに十分な権限があればインストールできるようにインストーラーを更新(Pawelさん、ご提案ありがとうございます!)
- SCARAロボットのサポートを追加
- 固定ツール、大きなジョイント制限値等に関する追加の警告
- 外部軸、エラーメッセージ、安全オブジェクトなどのバグ修正