2025.06.11 リリース

Resolver 2025.06.11
ドイツ・ミュンヘンで開催されるAutomaticaに向けて準備を進めております。ぜひ会場でお会いしましょう。Hall B6、ブース301にてResolverデモとRapidPlanデモを展示いたします。皆様のお越しをお待ちしております!
同時に、チームはマテリアルハンドリングと構成の最適化を含む新機能の開発に取り組んでまいりました。すべての新機能をご利用いただくため、PS Connectorを必ず更新してください。詳細については、以下をお読みいただくか、resolver.rtr.aiにて更新されたドキュメントとチュートリアルをご確認ください。
本日のResolver 2025.06.11リリース内容:
- PSでのマテリアルハンドリングのサポート
- PSでのステートフルオブジェクトのサポート
- PSでの構成の最適化
- ResolverのUIアップデート
- 更新されたドキュメントとチュートリアル
- PS Connector 1.1.1
PSでのマテリアルハンドリングのサポート
マテリアルハンドリングのパスプランニングとインターロック生成
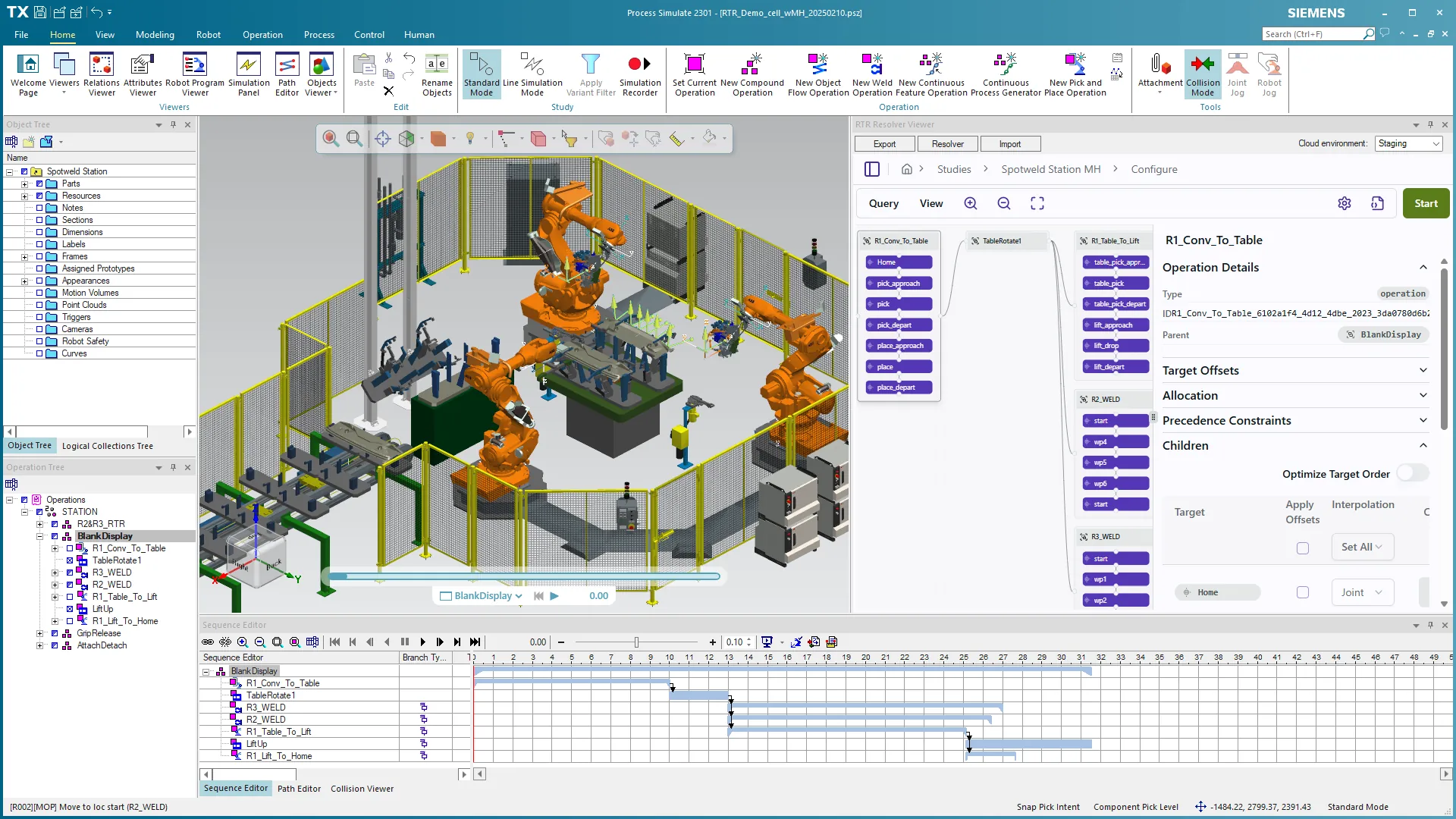
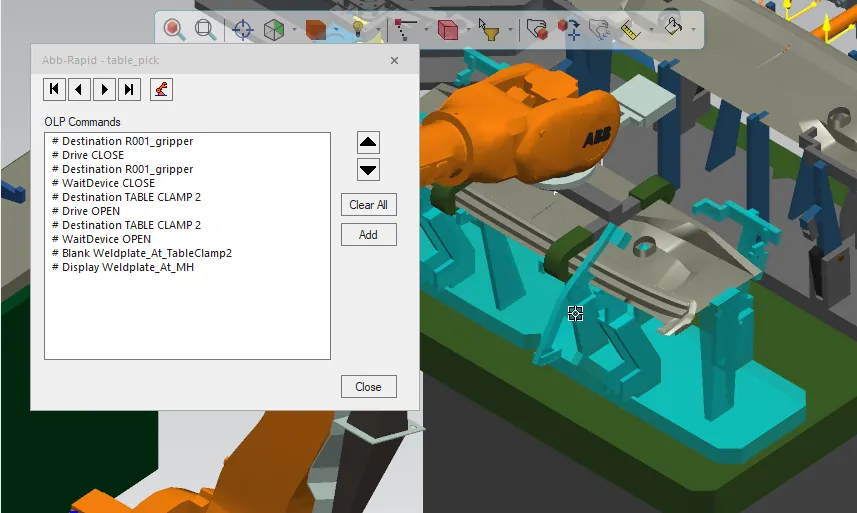
Resolverがマテリアルハンドリング用のOLPコマンドを使用したオペレーションに対応しました。この新機能により、マテリアルハンドリングとプロセスオペレーションが混在するワークセル全体をエクスポートおよびアップロードできるようになりました。
サポートされるOLPコマンド:
- Blank/Display
- Attach/Detach
- Grip/Release
PSでのステートフルオブジェクトのサポート
オペレーション中に状態が変化するクランプなどのオブジェクトに対応
マテリアルハンドリングのサポートに加え、Resolverはオブジェクトの状態を変更するOLPコマンドを含むオペレーションにも対応しています。オペレーション中に作動するクランプやグリッパーがある場合、Resolverはそれらの動作を考慮し、衝突のないパスとインターロックを生成します。
サポートされるOLPコマンド:
- Blank/Display
- DriveDevice
- JumpDevice
- WaitDevice
PSでの構成の最適化
オートティーチではなく、構成を最適化しませんか?
スタート/エンドターゲットおよびプロセスポイントに対して、最適なサイクルタイムにつながる構成を自動的に取得できます。
スタート/エンドターゲット – ボックス内でのツール最適化
スタートおよびエンドターゲットでは、EOATの位置範囲を制限するバウンディングボックスを定義すると、Resolverがオペレーションを最適化するスタートおよびエンド構成を見つけます。バウンディングボックスは、ツールのTCPに対する2つのポイントで定義されます。

プロセスターゲット – ツールの最適化
プロセスターゲットでは、アプリケーションに応じてResolverがさまざまな方法でロボット構成を最適化できます。「構成の最適化」を選択すると、ターゲット位置を維持しながら最適なロボット構成とパスを見つけます。「ツールRx/Ry/Rzの最適化」を選択すると、Resolverが指定されたTCP軸周りにターゲットを回転させ、最適な構成とパスを見つけます。

ResolverのUIアップデート
Build UIの自動選択とキャンバス上の新しいツールバー
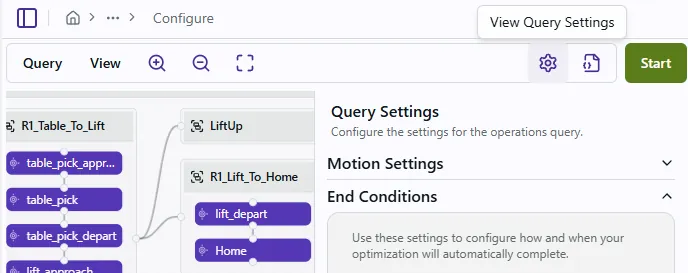
エンジニアリング工数の削減のため、Resolverのユーザーインターフェースの最適化を継続しています。スタディをエクスポートすると、Build UIが自動的に表示されるようになりました。また、「モーション設定」や「終了条件」などのクエリ設定を行うための歯車アイコンを含む新しいツールバーが追加されました。
更新されたドキュメントとチュートリアル
はじめての方向けの新しいチュートリアル動画
新機能のリリースに合わせて、ドキュメントページを継続的に更新しております。最近、上部に新しいセクションチュートリアルを追加しました。動画とステップバイステップの手順でスタートをサポートします。
新しいサポート対象機能ページ
Process Simulateについて、サポート対象機能を説明する新しいセクションが追加されました。Resolverで現在サポートされている機能とサポートされていない機能の詳細が記載されています。
PS Connector 1.1.1
複数のOLPコマンドのサポートを追加
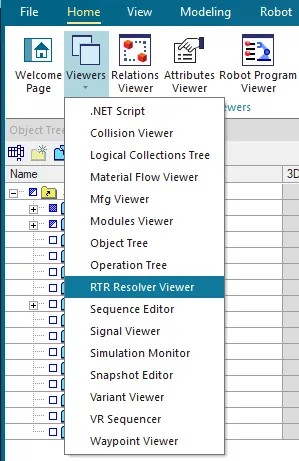
resolver.rtr.aiのResolver内にある新しいダウンロードページから最新バージョンをダウンロードしてください。最新のPS Connectorをインストール後、Viewersドロップダウンから「RTR Resolver Viewer」を選択してください。
初回ログイン時には、RTR Resolver Viewerの右上でお住まいの地域に応じてCloud環境を選択する必要があります。
- Europe:ヨーロッパにお住まいの方
- Global:南北アメリカ、APAC、その他すべての国

PS 1.1.1
- マテリアルハンドリング用OLPコマンド(Blank/Display、Attach/Detach、Grip/Release)のサポートを追加
- 状態変更OLPコマンド(Blank/Display、DriveDevice、JumpDevice、WaitDevice)のサポートを追加
- サイクル中のツール交換(Mount/Unmount、Connect/Disconnect)のサポートを追加
- 衝突セットで指定されたロボット間のクリアランス距離のサポートを追加
- 警告メッセージの文言を更新
- その他の改善とバグ修正
Resolver 2025.06.11
| コンポーネント | バージョン |
|---|---|
| Engine | 2.11.0-708-g661c3d6d28 |
| Cloud | 4c7d1bbd |
| PS Connector | 1.1.1 |