2025.09.08 リリース
· 約4分

Resolver 2025.09.08 提供開始
Resolverの新バージョンをリリースいたしました。
Resolver 2025.09.08には以下の更新が含まれています:
- Process Simulate Connector 1.5.0
- Visual Components Connector 1.4.0
- Gemini Connector 1.4.0
- Resolver Cloud
- Resolver Engine
サポートされているシミュレーションツールとバージョンの互換性情報は、Resolverドキュメントサイトの最小要件ページでご確認いただけます。お使いのシミュレーションツールのバージョンに関係なく、常に最新バージョンのResolver Connectorをダウンロードすることをお勧めいたします。
Resolver 2025.09.08の詳細をご覧ください。
すべてのConnector
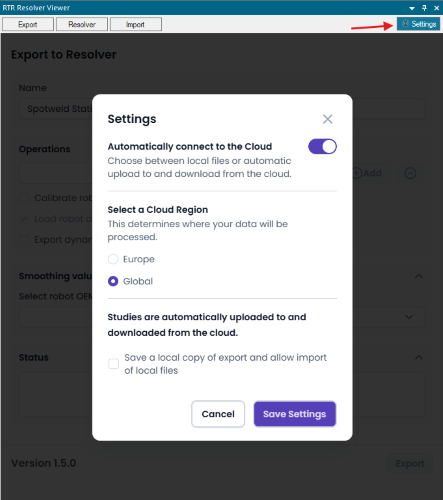
新機能:設定ダイアログ
- 統合ブラウザを使用してResolverに直接ファイルをエクスポート(デフォルト)、またはWebブラウザを使用してResolverに手動アップロードするためにファイルをローカルにエクスポートの選択
- クラウドリージョンの選択
改善:プリセット名にTCP名が含まれるようになりました
- この改善により、クラウドでロボット割り当てを設定する際に、どのプリセットを使用すべきかがより明確になります。
改善:自動バージョンチェック
- 古いConnectorでプロジェクトをエクスポートしていませんか?今後は、最新かつ最高のResolver機能にアクセスするために、自動的に更新が通知されます。
Resolverプラットフォームの機能強化
FANUCロボットのサポート強化とサイクルタイムの改善
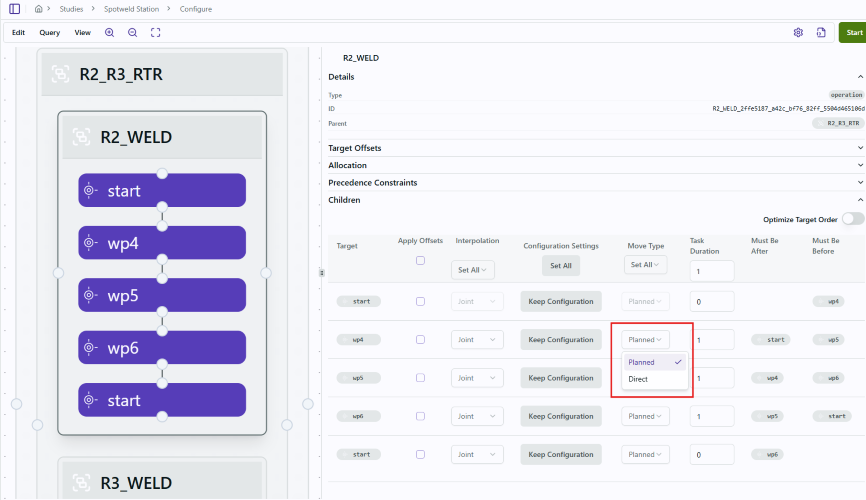
新機能:"Direct"ムーブのサポート
- "Direct"ムーブタイプにより、Resolverがプランニングするのではなく、単に実行されるロボットモーションを含めることができます。これにより、ロボットモーションの固定部分を含めながら、サイクルタイムとインターロックの精度を維持し、残りの部分をResolverがプランニングします。
- Resolverのデフォルト動作を維持したい場合は、変更は不要です。すべてのターゲットを"Planned"ムーブタイプのままにして、Resolverがオペレーションのすべてのモーションをプランニングできるようにしてください。
注意:ターゲットがEngineによって並べ替えられる場合("Optimize Target Order"が選択されている場合)、Directムーブタイプの使用は推奨されません。
改善:複雑なワークセルのサポート
- 大規模で複雑なワークセルの最適化を改善するため、Resolverのバックエンドに取り組んでいます。特に、ロボット割り当てクエリにおいて、大規模な問題を解決し、高品質な結果をより迅速に生成する能力が大幅に向上します。
- また、以下の改善もご確認いただけます:
- 多数のターゲット(200以上)への対応改善
- 未割り当てターゲットのリニアレール機能
- ロボット間の干渉を軽減するOptimize Rzの改善
Process Simulate Connector 1.5.0
リニアムーブのサポートを追加
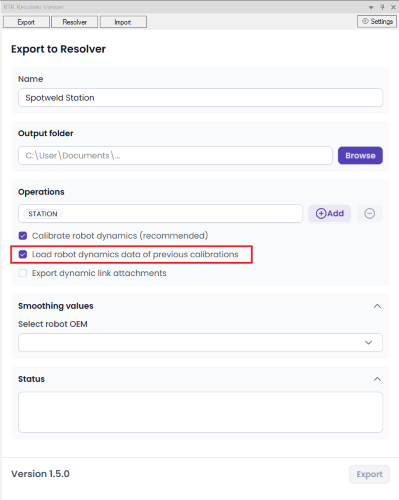
新機能:キャリブレーションデータのキャッシュ
- RCSを使用する場合、ダイナミックキャリブレーションは時間がかかることがあるため、RCSベンダーおよびSiemensと共にこの改善に積極的に取り組んでいます。当面の間、最初のエクスポート後にダイナミックデータをキャッシュする改善を導入しました。以降のエクスポートではデータを再利用できます。
VCおよびGemini Connectors 1.4.0
新機能:Visual Components 4.9のサポートを追加
改善:衝突検出器の自動エクスポート
- お客様のフィードバックに基づき、有効なすべての衝突検出器を含めることで、VC/Geminiの操作性を改善しました。衝突検出器の有効化を忘れた場合の意図しない動作を防止します。
- フィードバックをいただきありがとうございます!