2025.11.17 リリース
· 約7分

Resolver 2025.11.17 リリースのお知らせ
Resolverの最新リリースが利用可能になりました!Resolver 2025.11.17 の詳細については、以下をお読みください。
Resolver 2025.11.17 は、最新のコネクタによって有効化されています:
- Process Simulate Connector 1.9.1
- Visual Components Connector 1.9.1
- MELSOFT Gemini Connector 1.9.1
対応するシミュレーションツールとバージョンの互換性情報については、Resolverドキュメントサイトの最小要件ページをご覧ください。お使いのシミュレーションツールのバージョンに関わらず、常に最新バージョンのResolver Connectorをダウンロードすることをお勧めします。
Resolver 2025.11.17 には多くの改善が含まれています。主なハイライトは以下の通りです:
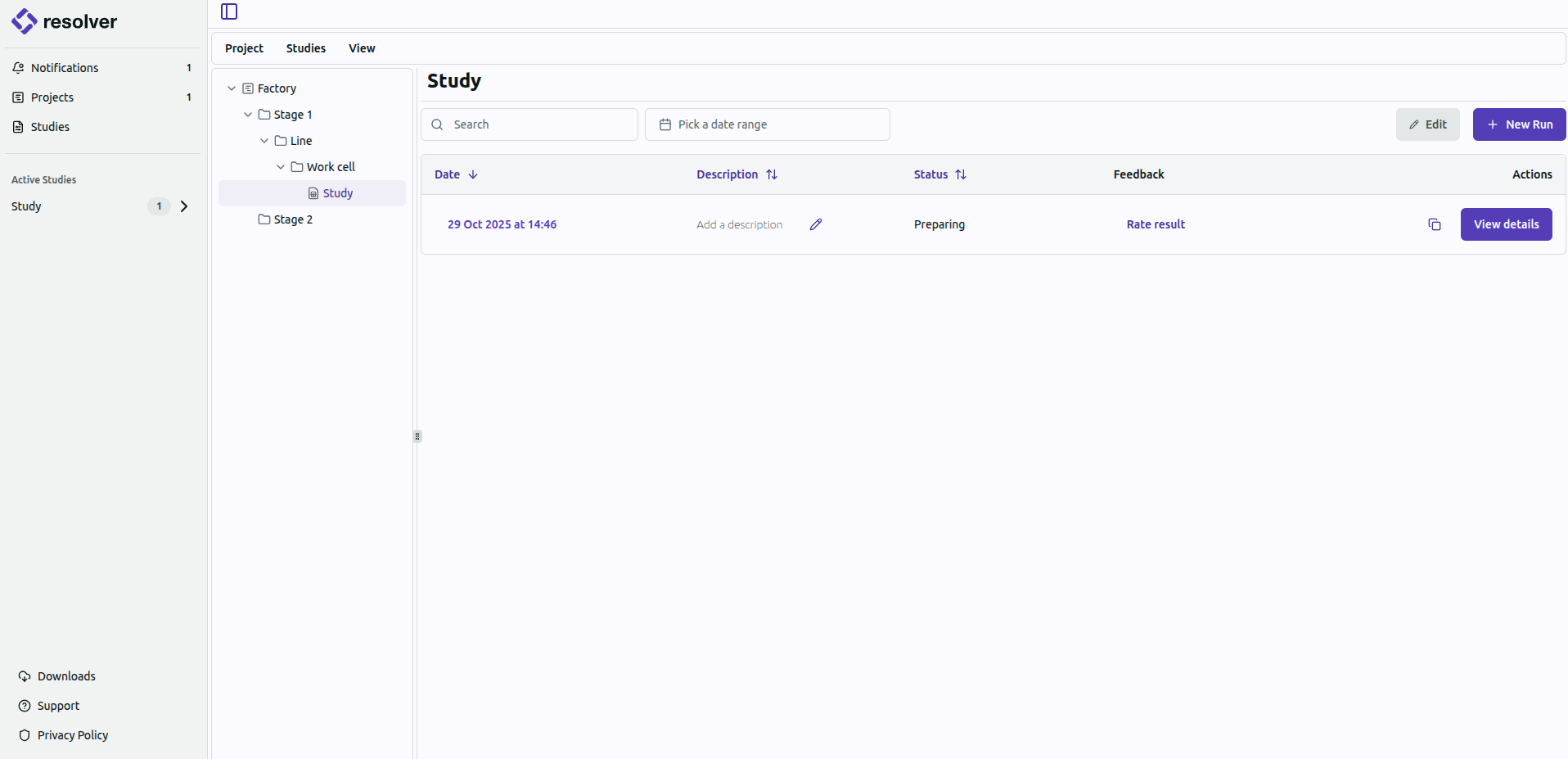
- プラットフォームUIでのスタディ整理のための新しいフォルダ構造を導入
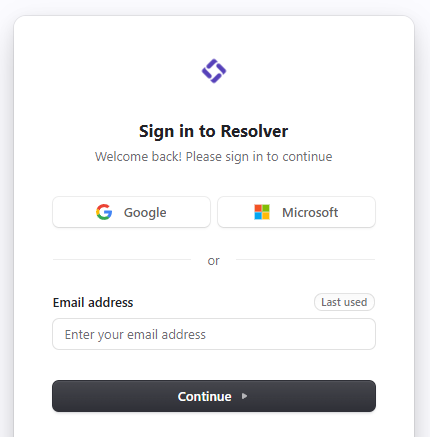
- Google またはMicrosoftアカウントでResolverにアクセスできる新しいログイン体験を実装
- Process Simulate Connectorのログインと認証の安定性を向上させ、組織のITポリシーとの整合性を強化
- ネイティブジョイントのみに動作制限を適用する機能を強化
Resolverプラットフォームの強化
新しいフォルダ構造とログイン体験
- 新機能: スタディを整理するためのフォルダ構造。
- ワークスペース: 左側のサイドバーに「Default」プロジェクトが表示されるようになりました。これはRTRのみが作成および名前変更できます。これには、実行あたりの割り当てロボット数が含まれています。実行あたりのロボット数は、RTRとの契約で特定されたロボット数に基づいて割り当てられます。
- フォルダの作成: ユーザーはプロジェクト内にサブフォルダを作成して、スタディを整理およびアップロードできるようになりました。コネクタを使用して、スタディを特定のフォルダに直接アップロードできます。実行あたりのロボット数は、プロジェクト内の任意のフォルダで使用できます。現在、フォルダの削除はRTRのみが行えます。
- スタディの実行: カスタムスタディをResolverにアップロードするには、営業契約で定義されたプロジェクトレベルでの実行あたりのロボット数が必要です。契約のないユーザーは、RTR Demo Cellを使用してResolverを引き続き実行できます。RTRは、支払い契約のないすべてのアクティブな顧客に対して、RTR Demo Cellスタディをロードできるよう「Demo」プロジェクトを作成します。
- 重要なお知らせ: スタディをアップロードするには、環境にプロジェクトフォルダが必要であり、独自のスタディで実行を行うには有料のお客様である必要があります。環境にプロジェクトがない場合、または独自のセルをResolverで実行したい場合は、担当のアカウント担当者にお問い合わせください。
- 新機能: GoogleおよびMicrosoftによるシングルサインオン(SSO)オプション付きの更新されたログイン体験
- 次回Resolverへのログインを求められた際に、GoogleまたはMicrosoftを使用してサインインするオプションを含む新しいログイン体験が表示されます。
- 新しいユーザーは、既存のGoogleまたはMicrosoftアカウントを使用してResolverに追加できるようになりました。
- これは何を意味しますか? 元のメールアドレスとパスワードで引き続きログインできますが、ユーザーはGoogleまたはMicrosoftのアカウント情報を使用してSSOでResolverにログインできるようになりました。
すべてのコネクタ
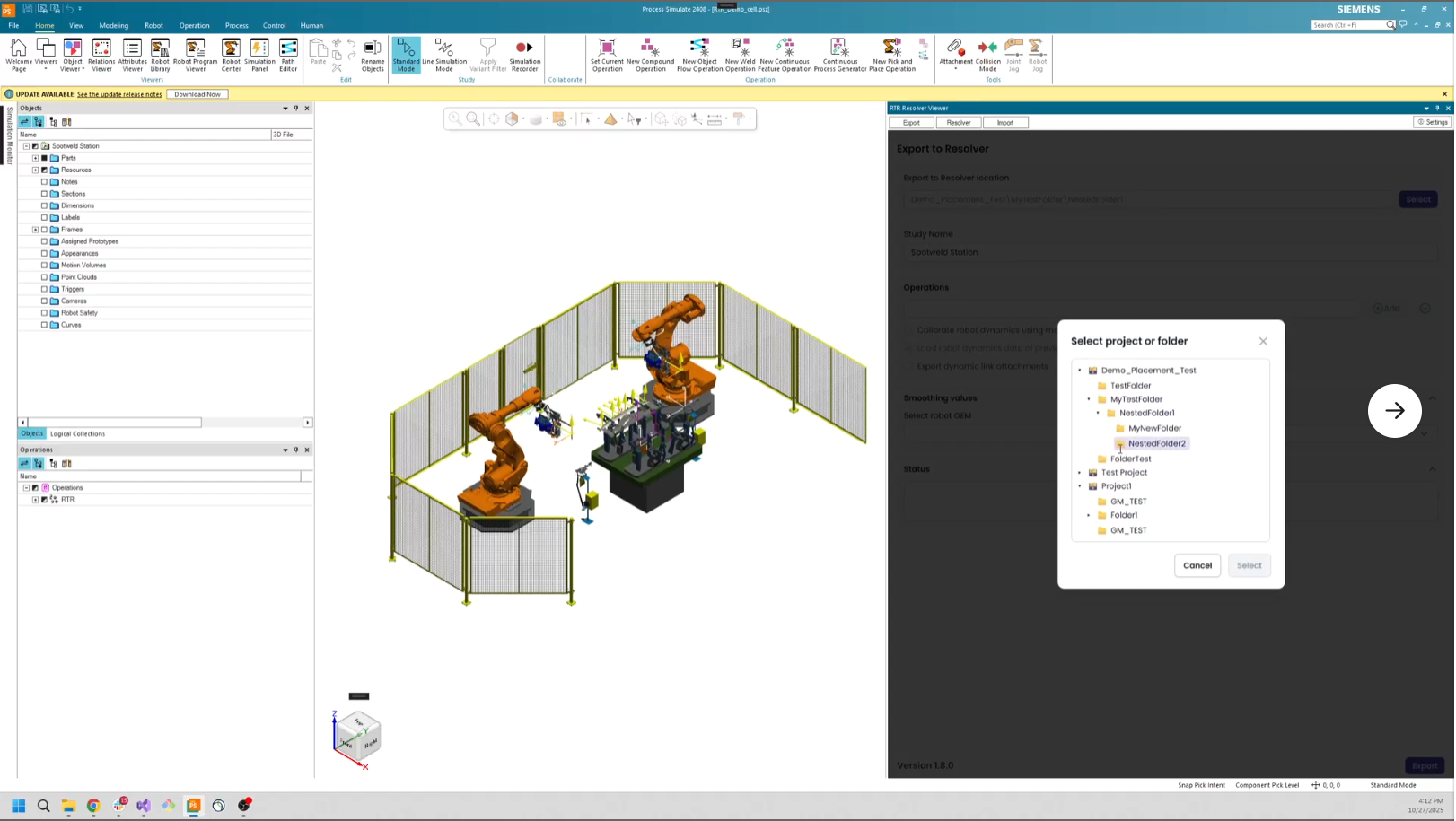
新機能: Resolverの特定のフォルダにスタディをエクスポート
- Resolverへのエクスポート時に、ユーザーは「選択」ボタンをクリックし、新しいフォルダナビゲーションウィンドウを使用してスタディのエクスポート先を正確に選択できます。
- コネクタでエクスポートオプションとして表示されるようにするには、フォルダをプラットフォームUIで事前に作成する必要があります。
改善: エラー報告のためのログ取得
- エラーが発生した際に「ログをダウンロード」するオプションが追加され、エラー発生時の状況をより正確に把握できるようになりました。
- エラーログにはタイムスタンプとエラーラベルが含まれます。
- 注意: 理解できないエラーメッセージが表示されましたか?チケットをお送りください!エラーメッセージを明確で実用的なものに改善し続けたいと考えています。チケットにはエラーメッセージの全文を含めてください。
Process Simulate Connector 1.9.1
FANUCロボットの構成強化とジョイント制限のあるロボットの使いやすさ向上
- 改善: FANUCロボット使用時の機能強化と構成オプションの追加
- ユーザーはスムージング値としてCNT 5を選択できるようになりました。
- 溶接ポイントでのアプローチおよびリトリートサブタスクの動特性キャリブレーションが改善されました。
- FANUC RCSの使用時に、追加のリニアおよび小規模なキャリブレーション動作により、モーションが改善されます。
- 改善: ユーザーログインと認証データに関連する安定性とキャッシング
- 改善: RTU関連のエクスポーター機能
- 改善: ジョイント制限のあるロボットの使いやすさ
- ジョイント動作範囲より大きい絶対値で「ジョイント動作制限の指定」を使用する場合、無効なジョイント制限に対する改善された表示が提供されます。
- エクスポート時の外部軸の制限チェックが強化されました。
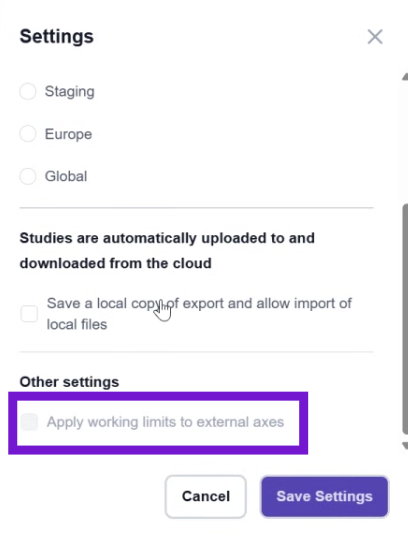
- 新機能: 外部軸に動作制限を適用するオプション
- ユーザーは、ネイティブロボットジョイントと外部ジョイントの両方に動作制限を適用できるようになりました。
- 設定ダイアログに、デフォルトで無効になっている「外部軸に動作制限を適用」という新しいチェックボックスがあります。
- チェックボックスがオンの場合、動作制限が外部軸に適用されます。オフのままの場合、動作制限はネイティブジョイントにのみ適用されます。
- 注意: これは以前の動作からの変更です。以前は、動作制限がネイティブジョイントと外部ジョイントの両方に適用されていました。新しいデフォルトでは、制限はネイティブジョイントにのみ適用されます。
Visual Components および Gemini Connectors 1.9.1
改善された衝突検出
- 新機能: Robot Executorのサポート
- これは何を意味しますか?Robot Executorを使用して、シグナルを活用し、ワークセル内のロボットと他のオブジェクト間の優先制約を適用できるようになりました。
- 改善: マテリアルハンドリングのユースケース
- マテリアルハンドリングケースでAssembly Status Featureの抑制を活用できるようになりました。
- 改善: 衝突検出器の整合性チェック
- アクティブな衝突検出器に非表示のオブジェクトが含まれている場合、エラーが表示されるようになりました。
- プログラムで参照されているがアクティブな衝突検出器に含まれていないオブジェクトがある場合、警告が表示されます。