2026.02.23 リリース
· 約7分

Resolver 2026.02.23 リリースのお知らせ
Resolver 2026.02.23 のリリースで新年を迎えられることを嬉しく思います!このリリースには、Resolverの体験を向上させるための多くの機能強化が含まれています。このリリースの内容について詳しくは、以下をお読みください。
Resolverは最新のコネクタによって有効化されています:
- Process Simulate Connector 1.16.0
- Visual Components Connector 1.15.0
- MELSOFT Gemini Connector 1.15.0
対応するシミュレーションツールとバージョンの互換性情報については、Resolverドキュメントサイトの最小要件ページをご覧ください。お使いのシミュレーションツールのバージョンに関わらず、常に最新バージョンのResolver Connectorをダウンロードすることをお勧めします。
リリースハイライト
新しい補間タイプとプラットフォームワークフローの更新
- 新機能: Process Simulateを使用したスポット溶接のハイブリッド補間
- ハイブリッド補間とは?ハイブリッド補間は、ターゲットウェイポイントへの近接度に基づいてジョイント補間とリニア補間をインテリジェントに切り替える軌道計画モードです。遠距離での高速ジョイントモーションと、プロセスポイント付近でのリニアモーションの制御性と人間の好みを組み合わせます。エンジンは、プロセスポイント周辺のゾーンの外側か内側かに基づいて補間タイプを切り替えます。
- 切替ゾーン外: 最大サイクルタイム性能のために最速パスのジョイント補間を使用します。
- 切替ゾーン内: コミッショニング中に人間がタッチアップしやすい制御されたモーションのためにリニア補間に切り替えます。
- モード間の遷移タイミングを決定する距離しきい値を切替距離(Switch Distance)と呼びます。
- 注意: Resolverは、ジョイント制限やシンギュラリティ検出のために生成に失敗したすべてのリニア指定モーションに対してジョイント補間にフォールバックします。これはハイブリッド指定に関係なく、すべての計画されたリニアムーブに適用されます。
- プラットフォームUIでの表示方法
- 実行の設定時にアプローチ戦略列にハイブリッドオプションが表示されるようになりました。
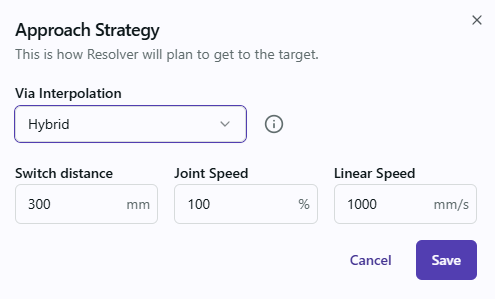
- ハイブリッドが選択されると、モーションパラメータの選択を行うための新しいウィンドウが表示されます。これらには以下が含まれます:
- 切替距離(Switch Distance): エンジンが高速ジョイントムーブから速度制限付きリニアムーブに切り替えるプロセスポイント周辺のゾーンの半径。
- ジョイント速度(Joint Speed): 切替ゾーン外で生成されるViaに使用される最大速度。100%のままにすることを強くお勧めします。
- リニア速度(Linear Speed): 切替ゾーン内で生成されるViaに使用される最大速度。
- Process Simulate Connectorでの表示方法
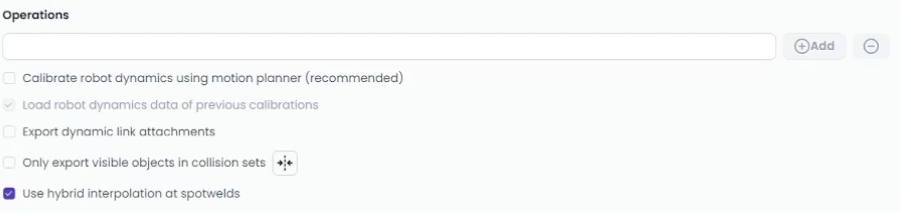
- すべてのスポット溶接ターゲットにハイブリッド補間を適用できる新しいチェックボックスが表示されます。
- エクスポートのための切替距離、ジョイント速度、リニア速度を調整するには、右上隅の設定アイコンをクリックしてください。
- チェックボックスが選択されると、ハイブリッドモーションパラメータの調整オプションが設定ダイアログに表示されます。
-
ハイブリッド補間の詳細についてはこちらをご覧ください。
-
新機能: FANUCロボットでのSD/EDスムージング
- FANUCロボットをお使いの方は、Resolverがスムーズなアプローチおよびリトリートモーションを含むパスを出力できるようになりました。
-
新機能: ログイン時のプロジェクトワークフロー
- Resolverログイン時に専用の「スタディ」ページがなくなりました。スタディと実行はツリーナビゲーションから見つけることができ、URLに/studiesを含むすべてのダイレクトリンクは置き換える必要があります。
すべてのコネクタ
改善された警告とエクスポート時の説明追加オプション
- 改善: 警告メッセージ
- すべての警告ポップアップで「今後表示しない」を選択できるようになりました。
- これはシミュレーションツール内のスタディごと、セッションごとに適用されるため、新しいスタディを開いた場合は、そのスタディで警告が発生した際に再度「今後表示しない」を選択する必要があります。
- すべての警告ポップアップをキャンセルすることもできます。
- 新機能: エクスポート時のスタディ説明
- スタディがResolverにアップロードされた後にプラットフォームで説明を編集するのではなく、エクスポート時にスタディの説明を含めることができるようになりました。
- 改善: アップロードタイムアウト
- 以前はアップロードセッションのタイムアウトが10分後に発生していましたが、1時間に延長され、大きなファイルのエクスポートが改善されました。
Process Simulate Connector 1.16.0
SD/EDの改善、新しいインポートオプション、スプラインモーションのサポート
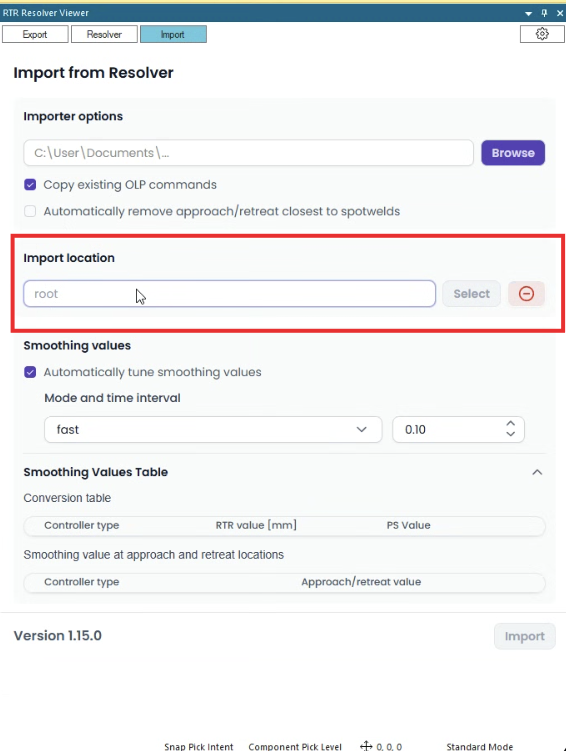
- 新機能: Resolver結果をインポートするオペレーションツリーの位置を選択するオプション
- オペレーションツリー内のインポート先の位置を選択できるようになりました。
- ツリー内のオペレーションを選択すると、デフォルトではルートである以前のインポート位置が上書きされます。
- インポート位置の選択は、インポートの成功に必須ではありません。
- 位置を選択しない場合、インポートは自動的にルートに行われます。
- 新機能: Resolverでのスプラインおよび円弧運動のエクスポートと実行
- スプラインはサブタスクポイントとして扱われ、スプライン動作全体が単一のターゲットとしてエクスポートされます。
- Resolverはスプライン動作へのアプローチとリトリートを最適化し、他のロボットとの衝突を回避しサイクルタイムを最適化するためにViaとインターロックを追加します。
- ジョイントまたはリニアのスプライン動作と円弧運動をサポートします。
- 新機能: FANUCロボットの溶接スケジュールのエクスポート
- Process SimulateでFANUCロボットを使用する場合、溶接スケジュールがプロジェクトデータの一部としてエクスポートされるようになりました。
- システムはこのテーブルのガン閉じ値を使用して、ロボット割り当て中に溶接ガンを設定します。
- この新機能を活用するには、PS ControllerでFANUCロボットの溶接スケジュールが正しく設定されていることを確認してください。
- 新機能: エクスポート時のSD/ED制限違反チェック
- 割り当てられたターゲットのSD/ED値がロボットのジョイント制限に違反する場合、新しいエラーが表示されます。
- 未割り当てのターゲットについて、いずれかのターゲットのSD/ED値がジョイント制限に違反する可能性がある場合の新しい警告があります。
- 改善: 溶接キャリブレーション
- セル内の各ロボットのより正確なアプローチおよびリトリート時間を抽出するために、溶接のキャリブレーションが改善されました。
- ユーザーがキャリブレーションデータをキャッシュすることを選択した場合の全体的なキャリブレーション時間が改善されました。
Visual Components および Gemini Connectors 1.15.0
UIの改善とバグ修正
- 改善: UIデザイン
- インポート中に新しいプログレスバーが表示されるようになりました。
- ポップアップダイアログに新しいボーダーが追加されました。
- アクティブなタブのハイライトやポップアップの新しい閉じるボタンなど、ボタンの改善が行われました。