Collision Rules
Collision Set のエクスポート
Process Simulate と RTR エンジンは、衝突の扱い方が根本的に異なります。Process Simulate では、ユーザーが明示的に定義しない限り Collision Set は存在しないものとみなされます。一方で RTR では、すべてのロボットとシーン間でデフォルトの衝突チェックが行われます。詳細については、Collision Rules セクションを参照してください。
エクスポート時に Collision Viewer 内でアクティブな Collision Set が存在しない場合、RTR のデフォルト動作が使用されます。そうでない場合は、PS で定義された内容と一致するように、エクスポート内に Collision Rule が生成されます。
Collision Rule でサポートされるオブジェクト
Resolver エンジンは Collision Rule において 3D および 2D オブジェクトをサポートしています。1D オブジェクト(ITx1Dimensional)はサポートされていません。これには点群や PolyLine などが含まれます。これらのオブジェクトを衝突対象として含めたい場合は、2D または 3D 表現を使用する必要があります。
Collision Rules
Collision Rule とは、2 つ以上のオブジェクト間の衝突の振る舞いを定義するための一般用語です。Process Simulate と RTR エンジンでは、衝突の定義方法に基本的な違いがあります。
Process Simulate のデフォルト動作
デフォルトでは、Process Simulate はオブジェクト間の衝突を考慮しません。すべての Collision Set を定義するのはユーザーの責任です。Check 列のオブジェクトが With 列のオブジェクトに接触すると衝突が検出されます。
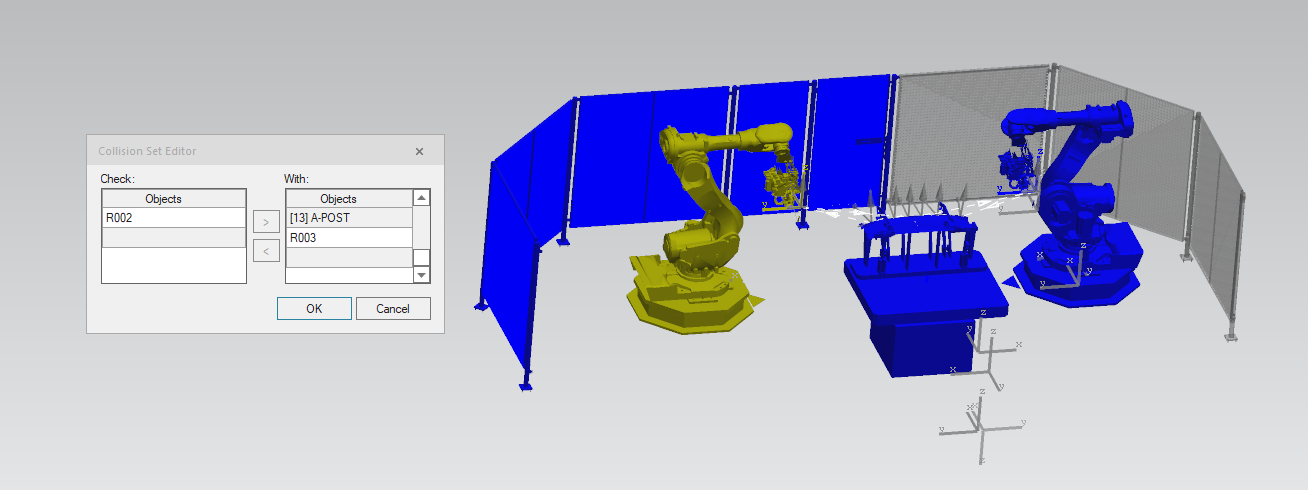
各 Collision Set には Near Miss 値も関連付けられており、2 つのオブジェクトが互いに近接していることをユーザーに警告する役割を果たします。

Process Simulate における衝突動作の詳細: https://docs.sw.siemens.com/en-US/doc/288782031/PL20231017544579710.tecnomatix_eMS.xid1015765/ToolsMenu_Options_CollisionTab
RTR エンジンのデフォルト動作
デフォルトで RTR エンジンは、Robot-to-Robot および Robot-to-World のあらゆる接触に対して衝突を検出します。この動作をユーザーが調整する仕組みは「disable collision rules」を介して行われ、これは Process Simulate とは正反対の動作です。そのため、Process Simulate プロジェクトを RTR プロジェクトへ変換する際には特に注意が必要です。
衝突 vs. Clearance
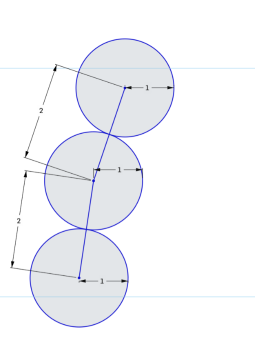
RTR エンジンのモーションプランニングの観点では、Clearance と衝突は同じ概念です。衝突とは単に Clearance 値が 0mm の状態にすぎません。なお、パス生成で使用されるデフォルトのグローバル Clearance 値は 1mm です。Clearance はパスエッジ上で 最大でも 2mm ごとにチェックされます。
RTR エンジンは、代替のパスが存在しない場合には Clearance(または衝突)の値に違反します。エンジン内で評価される各解にはコストが関連付けられており、どのパスが最適かを判断します。Clearance ルールに違反するパスには高いコストが加算されますが、衝突を含む解しかない場合にはその中から選択されます。この手法は、ユーザーに期待される衝突を明示的に追加・削除させることなく、最も柔軟な対応を可能にします。
例として、溶接ガンのチップと部品の間の衝突は想定内です。Process Simulate ではこれを Tool Definition 内で ignore collision rules を追加することで対応します。仮に RTR エンジンが同様の処理を行った場合、溶接チップが常に無視されてしまい、衝突を含むモーションパスが生成されることになります。その代わりに、溶接チップを衝突オブジェクトのままにしつつ、必要な場合にのみ衝突を許容することで、溶接点でのみ衝突する衝突フリーなモーションパスを生成できます。