Study のエクスポート
何がエクスポートされるか
モーションパス、Interlock、タスク割り当てを最適に生成するには、Process Simulate Study の要素を Resolver にエクスポートする必要があります。PS ConnectorSoftware plugins, developed by RTR, that enables the export of projects from 3rd party simulation tools such as Process Simulate and Visual Components for use with Resolver. The Connector also enables... は、PS Study から必要な CAD オブジェクト、キネマティクス、ダイナミクス、Operations、Target を収集し、エクスポート時に自動的に Resolver へアップロードします。
エクスポーターは、Resolver によって解釈される .zip ファイルを生成します。.zip ファイル内には以下のファイルが作成されます。

project.yaml
エンジンが Workcell をどのように構築すべきかを定義します。objects および robot_models フォルダー内のすべての項目への参照が含まれます。エンジンはこのファイルを参照して、オブジェクトの配置と接続方法を決定します。
queries.json
エクスポーターから生成されたクエリを定義します。Operations、Target、Precedence 制約などがここで定義されます。
metadata.json
ユーザーエクスペリエンスを調整するために使用されるパフォーマンスおよび Study データを収集します。
objects
エクスポートされる静的オブジェクトのすべての .jt ファイルを格納します。
robot_models
仮想ロボットモデルを作成するために project.yaml のキネマティクス定義と一緒に使用される、ロボットモデルの .jt ファイルを格納します。
エクスポートの準備
表示されているオブジェクト
現在表示されているすべてのオブジェクト(ロボットを含む)は、Resolver に送信されるエクスポートに含まれます。
- モーションプランニングに必要でないオブジェクトは Blank にしてください。 これによりファイルサイズと衝突チェック計算を大幅に削減し、パフォーマンスを向上させることができます。
- Blank されていないロボット のうち 関連する Operation がエクスポートされていない ものは、現在のポーズで静的オブジェクトとしてエクスポート されます。
Dynamic Link Attachments
Dynamic Link Attachments とは?
Dynamic Link Attachments は、Process Simulate Study 内でロボットのジョイントによって位置または形状が変化するオブジェクトのことです。例えば、ロボットとともに動くケーブル、リンクバー、ドレスパッケージ、その他のデバイスなどです。これらはロボットとともに動くため衝突チェックに影響する可能性があり、モーションプランニングに関連する場合はエクスポートされる衝突ジオメトリに含める必要があります。
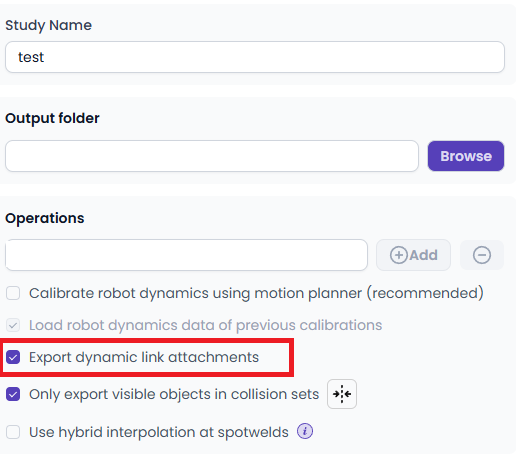
Process Simulate Study にエクスポートされる衝突ジオメトリに含める必要があるロボット連動の動的オブジェクトが含まれている場合は、Export dynamic link attachments を使用してください。
- Robot Jog -> All Joints に表示される動的ジョイントおよびデバイスは、このトグルに関係なくエクスポートされます。
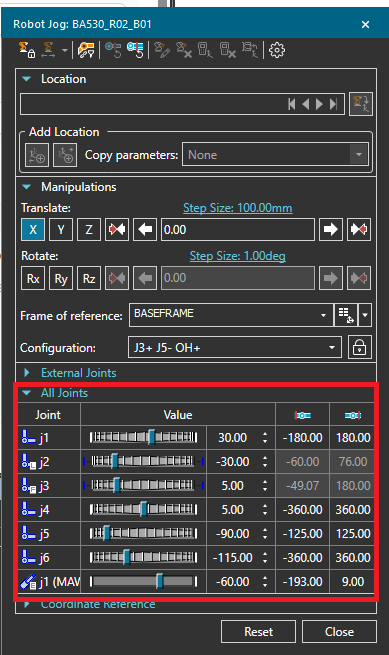
- オブジェクトがロボットのジョイントに依存して動的であるにもかかわらず、Robot Jog -> All Joints に 表示されていない 場合は、Export dynamic link attachments を有効にしてエクスポートに含めてください。
- アタッチされたデバイスがプランニングの精度にとって衝突クリティカルである場合は、このオプションを有効にします。
- これらのアタッチメントが不要な場合は、エクスポート範囲を小さく保つために無効のままにしておきます。
- 大きく複雑な動的アタッチメントは計算時間を増加させる可能性があります。例えば、数十個の球形プリミティブで表現されたドレスパッケージは、エクスポートとプランニングを遅くする可能性のある衝突ジオメトリを追加します。
このオプションを有効にする場合は、該当するロボットに Process Simulate でアクティブな Collision Set が設定されていることを確認してください。
Resolver がアタッチメント関連のエクスポート問題を報告した場合は、次を参照してください。
Collision Sets
Collision Set が有効で正しく設定されていることは非常に重要です。PS で定義された Collision Set は project.yaml の collision_rules に変換 されます。これらの Collision Rule は Resolver エンジンによるモーションプランニング中に使用されます。Collision Set が不適切または不完全に定義されている場合、結果として予期しないモーションパスが表示されることがあります。
- PS の Collision Sets 機能でセットアップされ有効化されたすべての衝突は、エンジンにおいて ハードな衝突ルール として設定されます。エンジンはハードルールを決して違反しません。
- Collision Set に関連付けられた Near Miss 値は
project.yaml内の Clearance ルールに変換されます。Clearance ルールは ソフトルール であり、必要な場合を除き違反されません。- 近くに Process Point のある Collision Set では、Near Miss 値を 2mm 未満に設定することを強く推奨します。
- 注意: Near Miss 値を設定する際はご注意ください。多くの Study を Resolver で実行した結果、カスタマーサクセスチームは、人間がパス作成時に自身の Clearance ルールを守らないことが多いことを確認しています。
- 例: 2 つのスポット溶接間の短い距離で、人間であれば最初の溶接の Depart と次の溶接の Approach の間に Via を置かないでしょう。これが Resolver で planned パスであり、Depart 位置が Near Miss 値に違反する場合、エンジンは溶接ガンを Clearance 違反から引き離そうとして 2 つの溶接間に Via を追加します。
- 最低限推奨される Collision Set:
- Robot-Robot: ロボット間の Collision Set。Resolver は Study 内のすべてのロボットに対する単一の Clearance ルールをサポートしています。そのため、すべての Collision Set 内で見つかる最大の Robot-Robot Near Miss 値 が使用されます。
- Robot-Scene: ロボットとシーン内の静的オブジェクト間の Collision Set。結果に衝突が見られる場合、通常はオブジェクトが Collision Set に含まれていなかったことが原因です。
- 注意: 多くのお客様は robot-structural、robot-jig、robot-part、tool-part など、より細かい Collision Set の使用を好みます。これにより Collision Set ごとに個別の Clearance ルールを設定できます。
- Robot-(Tool+RTU): これはセルフ衝突セットです。アプリケーションでロボットが自分自身に近接する必要がある動作が発生する場合、セルフ衝突を防ぐ Collision Set を設定することを推奨します。

他のアプリケーションは RTR Application Engineer の支援によりサービスとしてサポート可能です。お使いの Study がサポートされているか不明な場合、または現在のツールサポート外の Study を実行したい場合は、サポートチケット を送信してください。
ダイナミクスキャリブレーション
選択すると、エクスポーターはロボットを一連の動作で動かし、ジョイントとリニア動作の両方のすべてのジョイントダイナミクスを判定します。エクスポート時に選択された Motion Planner が Dynamics Calibration の実行に使用されます。
- 可能な限り常に RCS モーションプランナーを使用してください。 例えばエクスポート時に MOP が選択され、後で RCS が使用されると、推定 Cycle Time やダイナミクスが大きく異なる場合があります。

- Resolver からのソリューションはダイナミクスに大きく影響される可能性があります。特に Robot-Robot のデコンフリクションゾーンが多い場合はその傾向が顕著です。ダイナミクスが正しくエンコードされていない場合は、適切な RCS 接続が行われていることを確認し、ダイナミクスキャリブレーションを再実行してください。
- ダイナミクスキャリブレーションには時間がかかりますが、通常はロボットごとに 1 回だけ実行すればよいものです。そのため、ダイナミクスはデフォルトでお使いのマシンにローカルでキャッシュされ、将来のエクスポートで再利用されます。
- ペイロードの変更など、ダイナミクスに影響するロボット設定の変更があった場合は、オプションのチェックボックスを使用してダイナミクスキャリブレーションを再実行してください。
MOP Motion Planner でパスを実行
RTR が生成するパスは、実際のロボットコントローラーがゴール Target に同時に到達するためのジョイント同期化と同じ一般的な概念に従います。しかし、MOP Motion Planner はデフォルトではこの動作を示しません。ロボットコントローラーの motionparameters.e ファイル内で single_joint_prof パラメーターが適切に設定されていないと、パスに衝突が発生する可能性があります。Process Simulate の motionparameters.e マニュアルより:
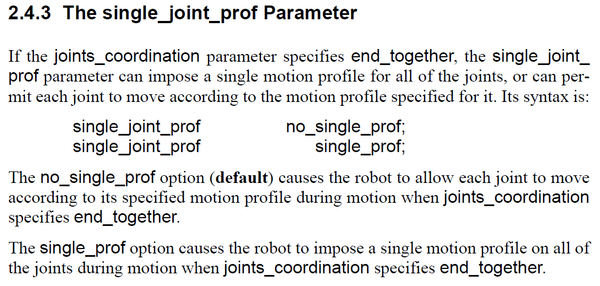
RTR および他のロボットメーカーが予測する動作と一致させるには、motionparameters.e ファイルに single_joint_prof single_prof; の行を追加してください。
Operations のエクスポート
現在、Resolver は Standard モードで複数の Operations または Compound Operations をエクスポートするよう設計されています。エクスポートされたすべての Operations は、Operations 間に定義されたリンク(Sequence Editor 内)を使用して Precedence 制約を判定 します。選択された Operations に適用されるいくつかのルール:
- ロボットが到達する必要がある Target のみを含める必要があります。これは通常、Process Point のみが該当しますが、プロセスがそのポーズでの停止を必要とする場合は Via も含まれることがあります。Resolver に送られる各 Location 間のパスは、クラウド UI で「direct」と指定されない限り計画されます。
- Operations を持つすべてのロボットには Start ポーズと End ポーズが定義されている必要があります。エクスポーターは、ロボットの Operations シーケンスの最初と最後の Location から暗黙的な Start および End ポーズを使用します。
- Operation にロボットが割り当てられている場合(Operation->Properties->Process タブで確認可能)、エクスポート前に Reachability チェックが実行されます。ユーザーによって構成が定義されていない場合、エクスポーターは Process Simulate API が「jump」機能で選択する構成を使用します。もちろん、構成はクラウド UI で有効にすれば Resolver によって最適化できます。
- ロボットが割り当てられていない Operation がエクスポートされた場合、エクスポーターはエクスポートされたすべてのロボット(依然として Start/End Target が定義されている必要があります)がその Target に到達できると想定します。これは「robot allocation」問題を設定する一般的な方法です。
- Optimize Target Order が選択されていない場合、Target の順序は結果で維持されます。
-
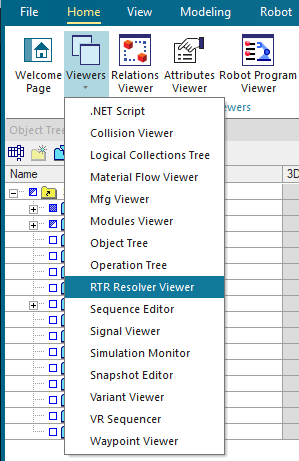
RTR Resolver Viewer が表示されていることを確認してください。表示されていない場合は、リボンの Viewers ボタンから選択してください。
-
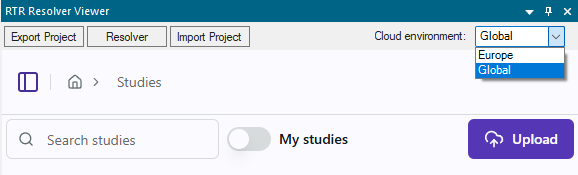
ログインしていない場合は、まずドロップダウンメニューから正しい Cloud 環境を選択してください。
- Europe: ヨーロッパ地域
- Global: アメリカ、APAC、その他すべての国
-
Export セクションで、エクスポートに名前(Study の名前)を付けます。
-
Operations Treeから選択し、Export セクションの+Addボタンをクリックして、エクスポートしたい Operations または Compound Operations を追加します。 -
「Calibrate robot dynamics (recommended)」を選択することを推奨します。選択すると、Exporter は現在選択されているロボットコントローラーを使用してロボットを一連の Location に移動させます。動きを追跡し、ジョイントのダイナミクスを記録します。溶接ガンも溶接位置で作動し、Process Point での task time をキャプチャします。これらの値は queries.json に埋め込まれ、Resolver エンジンが Cycle Time をより正確に予測するために使用されます。
-
コントローラー固有のどの Smoothing オプションを使用するかを指定するためにロボットの OEM を選択します。デフォルトではすべてが含まれます。Resolver に使用させたくないオプションの選択を解除できます。
注意:
FINEオプションは、新しく生成された Via Location での Interlocking に必要なため選択解除できません。 -
Exportをクリックして Study をエクスポートし、自動的にクラウドへアップロードします。