サポートされる機能
ソフトウェア
サポートされているソフトウェアのバージョンについては、最小要件 セクションを参照してください。
Study モード
Process Simulate では Standard モードのみがサポートされます。Line Simulation モードはサポートされません。
サポートされるアプリケーション
- Spot Welding
- Riveting
- Inspection
- Point-to-point モーション
- Material Handling
- RTU
- Tool changer
ロボット
一般に、以下の既知の制限を除き、ロボットのエクスポート方法に関して予想される問題はありません。エクスポート時にロボットのリンクの CAD は、生成された .zip の cad フォルダーに配置されます。キネマティクスとダイナミクスは project.yaml にエンコードされます。エクスポート時に Calibrate Robot DynamicsSetting in Export to RTR dialog, if selected, will attempt to automatically calibrate dynamics of the robots for use in the RTR engine. Using whatever controller and motion planner selected in Process... チェックボックスを有効にしない限り、各ジョイントのダイナミクスはロボットモデルから直接取得されます。
サポート
- 6 DoF ロボット
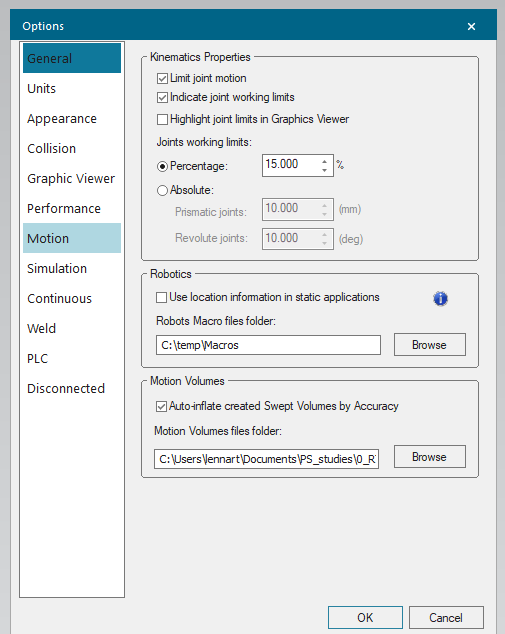
- ジョイントの動作制限
- PS で「indicate joint working limits」チェックボックスが有効な場合、ロボットの動作制限は設定に従って(パーセンテージまたは絶対値で)縮小され、目的の制限を超えないようになります。これらの制限はエクスポート中に各 Target でチェックされ、違反した場合はユーザーに警告が表示されます。値はエクスポートされた
project.yamlで調整されます。注: 可変ジョイント制限については PS の動作から小さな数値的なずれが生じる可能性がありますが、固定ジョイント制限は厳密に一致します。
- PS で「indicate joint working limits」チェックボックスが有効な場合、ロボットの動作制限は設定に従って(パーセンテージまたは絶対値で)縮小され、目的の制限を超えないようになります。これらの制限はエクスポート中に各 Target でチェックされ、違反した場合はユーザーに警告が表示されます。値はエクスポートされた
非サポート
- 6 DoF 以外のロボット(7 DoF、SCARA、デルタ、ガントリースタイルのロボットなど)。
- 注: これらのロボットはエクスポートでき、エンジンで結果を生成する場合もありますが、エンジンはこれらのタイプ向けに最適化されておらず、予期しない動作を示す可能性があります。
- 複数の可変ジョイントポリゴンの一部であるジョイント。
- 可変ジョイント制限のための凹型ポリゴン。
オブジェクト
サポート
- 3D オブジェクト(コンポーネント、スイープボリュームなど)
- 2D オブジェクト(平面、セーフティゾーンなど)
非サポート
- 1D オブジェクト(線、点など)
Frames
エクスポートされる Frame は、エクスポートされた Operations 内で目的を持つものだけです。例えば、エクスポートされた Operation で使用される TCP としての Frame が挙げられます。
Parts/Appearances
Appearances はサポートされており、エクスポート時に表示されている、またはエクスポートされた Operation の 1 つで OLP コマンド(例: # Display)によって表示されている場合に、エクスポートに含まれます。
点群
点群は 1D オブジェクトのカテゴリに分類されるため、現在サポートされていません。
モーションボリューム
モーションボリュームは 3D オブジェクトのカテゴリに分類されるため、サポートされています。エクスポート時に表示されている、またはエクスポートされた Operation の 1 つで OLP コマンド(例: # Display)によって表示されている場合に、エクスポートに含まれます。
モーションボリュームは、Resolver エンジンの keep-out ゾーンを定義するのに非常に役立ちます。2 つの良いユースケース:
- ロボット A のパスはプロセスに対してすでに決定されているが、近くに並行して動作するロボット(ロボット B)があり、そのモーションプランが Resolver によって生成される場合。ロボット A のモーションボリュームを Operation 中に表示して、ロボット B の keep-out ゾーンとして機能させることを推奨します。Resolver エンジンがそれを避けるべきと認識できるよう、必ずモーションボリュームをロボット A との Collision Set に含めてください。
- シーン内の非ロボット・ステートフルデバイス(例: クランプ、ターンテーブル)が動作中に駆動され、Resolver が遷移中にこの領域を避ける必要がある場合。現在、Resolver はステートフルな非ロボットデバイスのジャンプのみをサポートしており、動作をシミュレートするためのキネマティクスはサポートしていません。ただし、モーションボリュームを使用して、OLP コマンド(
# Display/# Blank)でデバイスの動きをブロックできます。
ターンテーブルの動きの keep-out ゾーンを定義するためにスイープボリュームを使用する例。
OLP コマンド
以下は、お客様からの要望があったサポート/非サポートの OLP コマンドのリストです。これは Process Simulate のすべての OLP コマンドの網羅的なリストではないことに注意してください。多くはエンジンの結果に影響を与えません。お使いの Operation が以下のリストにない OLP コマンドを使用している場合、無視されると想定するのが安全です。追加機能の要望については、サポートチケット を送信してください。
サポート
# Blank/# Display# Attach/# Detach# Grip/# Release# WaitTime# DriveDevice/# JumpDevice/# WaitDevice/# DriveDeviceJoints- 注: ロボットのジョイント(ネイティブロボットジョイントおよび外部軸)に適用される場合は非サポート。
- 注:
# DriveDeviceコマンドに対応する# WaitDeviceコマンドが Location の OLP コマンドリスト内にない場合、PS は現在の Operation の残りを実行しますが、状態変更が完了しない限り次の Operation に進みません。エクスポーターは、状態変更を Target の Operation の末尾に追加することで、エンジンに送信されるクエリに同じ動作をエンコードします。 - 注: 異なる Operations(例: ロボット A、B、C)から単一のデバイス(例: トラニオン)へのこれらのコマンドを並列で実行することはサポートされていません。3 つのロボットすべてが共有のトラニオンジグを同時に駆動するようコマンドするカスタマーユースケースを確認していますが、これはサポートされていません。
# Connect/# Disconnect# Mount/# Unmount- テキストがサポートされている標準コマンドのいずれかに厳密に一致する場合のフリーテキストコマンド。フリーテキストコマンドのデバイス検索で 2 つ以上のデバイスが返される場合、Resolver connector はエラーをスローします。
非サポート
# SendSignal/# SetSignal/# WaitSignal# GunToState
インポートダイアログには「Copy existing OLP commands」オプションがあり、デフォルトで有効になっています。チェックされている場合、結果のインポート時に connector は元の Operation を検索し、エンジンで使用されたかどうかに関係なく既存の OLP コマンドをコピーしようとします。Target 順序の最適化または Robot Allocation が Operation に対して実行された場合、これらの OLP コマンドの Operation 内での位置は移動する可能性があります。
サポートされるすべてのアクションは、query 内の 1 つ以上の Action または SubAction としてエンコードされます。サポートされない OLP コマンドは DummyAction または DummySubActions としてエンコードされます。
Location タイプ
サポートされる Location タイプ:
- Via (TxRoboticViaLocationOperation)
- Spotweld (TxWeldLocationOperation)
Importer は、結果のインポート時にエクスポートされた Operation が PS Study に存在し続けていることに依存します。Importer は元の Operation を検索し、Location タイプを含む Location のデータをコピーします。エンドツーエンドのワークフローを成功させるためには、Resolver の実行の結果がインポートされるまで、エクスポートされた Operation を変更せずに保持することが重要です。Resolver の実行中にプログラムを編集する必要がある場合は、結果がインポートされるまで複製を作成することを推奨します。
Location パラメーター
Exporter は次の Location パラメーターをエンジンに渡します:
- Name
- ExternalID
- Config
- Interpolation
- Speed
- TCP
- OLP コマンド
エクスポートされたすべての Location は「Process Point」として扱われるため、Smoothing 値はゼロが適用されます。これらの Process Point への往復のエアモーションには、許可されている場合(デフォルトで許可)Smoothing 値が適用されます。