Collision Rules
衝突検出器のエクスポート
Visual Components と Resolver エンジンThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... はどちらも衝突検出をサポートしていますが、デフォルトの動作が異なります。
| 動作 | Visual Components | Resolver エンジン |
|---|---|---|
| デフォルトの衝突チェック | オフ — 明示的に有効化されない限り衝突なし | オン — デフォルトで完全な衝突検出 |
| ユーザー制御 | チェックする 対象を定義する必要がある | チェックしない 対象を定義できる |
| 衝突許容値 | 近接の警告しきい値として使用される | プランニング中に「ソフト」制約として扱われる |
Collision Rule を理解する
Collision Rule は、オブジェクトが接触したときにシステムがどのように動作すべきかを定義します。特定の条件下で衝突を 回避 するか、許可 するか、許容 するかを定めます。
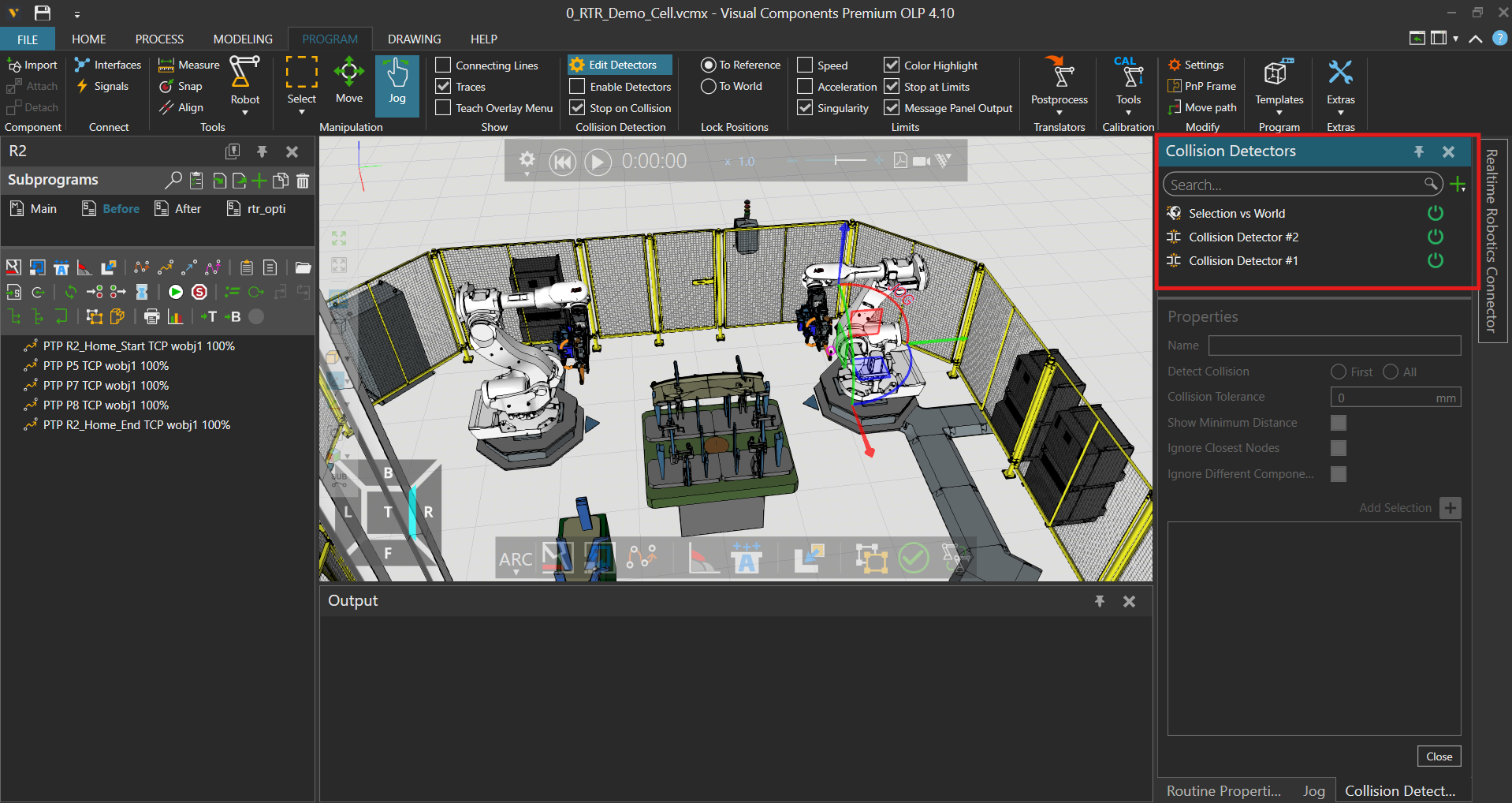
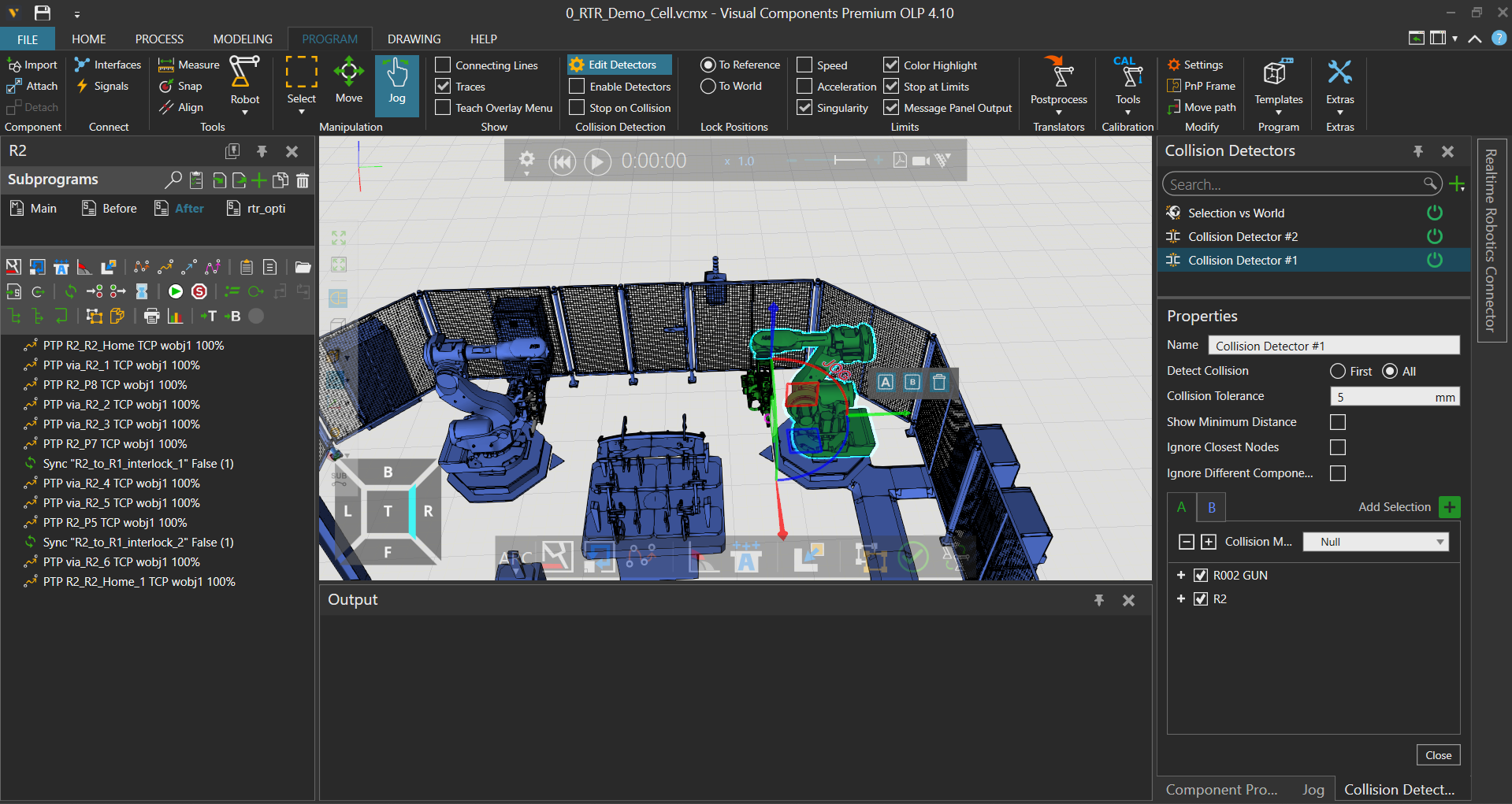
Visual Components: デフォルト動作
デフォルトでは、Visual Components は Collision Set が明示的に有効化されていない限り 衝突をチェックしません。
- 衝突検出は、A 列と B 列で指定されたオブジェクトペア間でのみ行われます。
- ユーザーはこれらのセットを手動で構成する必要があります。
- 各セットには Collision Tolerance(衝突許容値)を含めることができ、これは近接の警告しきい値として機能します。
Visual Components Academy で詳細を確認
Resolver エンジン: デフォルト動作
Resolver のモーションプランニングエンジンは、デフォルトで次を含む すべての衝突をチェック します。
- Robot-to-Robot
- Robot-to-World
- Robot-to-Environment
Resolver はユーザーに チェックする 対象を定義させるのではなく、必要に応じて特定のチェックを 無効化 できるようにします。
Visual Components から Resolver に変換する際、エクスポーターは定義されたすべての Collision Set が尊重され、適切にマッピングされることを保証します。
衝突 vs. Clearance
Resolver では、衝突と Clearance は統一された概念 です。
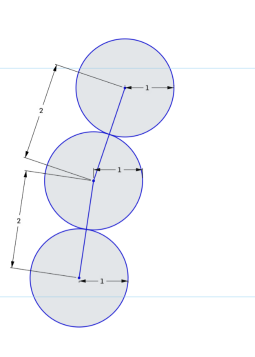
- 衝突 は 0 mm の Clearance として定義されます。
- デフォルトのグローバル Clearance は 1 mm であり、モーションセグメントに沿って 最大でも 2 mm ごと にチェックされます。
エンジンが競合を解決する方法
エンジンは各候補パスに コスト関数 を適用します。Clearance または衝突ルールに違反するパスには 高いペナルティ が課されるため、プランナーは衝突のないモーションを強く優先します。違反は、すべて の可能なパスが衝突する場合にのみ選択されます。
つまり、シナリオごとに手動で「ignore collision」ルールを追加または削除する必要は ありません。エンジンは動的に最適なオプションを決定します。可能な限り衝突のないモーションを優先し、どうしても必要な場合には制御された違反を許可します。
実例: 溶接ガンチップの接触
溶接チップが部品に接触するような想定された衝突は、各システムで異なる方法で扱われます。
Visual Components の場合
Visual Components は、接触の瞬間にのみ動的に衝突を許可する方法(例えば Process Simulate の「Smart Tip」機能)を 提供していません。代わりに、Collision Detector を設定して、特定の想定される接触を完全に無視することで衝突を管理します。その結果、衝突点までのパス全体が衝突フリーとみなされますが、これはプロセスの意図を正確に反映していない場合があります。
Smart Tip のような機能が利用できないため、ユーザーはスポット溶接などのプロセスで回避策を使用する必要があります。最終的な溶接ポイントを部品から 1 mm(または小さな Clearance)だけ オフセット させることです。これにより Resolver エンジンは、希望の Approach 点まで衝突することなくロボットパスを計画できます。ロボットは実際の接触の直前の位置に移動し、最終的な Approach セグメントは別途処理されるか、プロセスによる意図された接触として受け入れられます。
パスプランニングの失敗を避けるためには、溶接ポイントのオフセットが必要です。Resolver は定義された Clearance を尊重し、Visual Components からインポートする際に接触の瞬間だけ動的に衝突を許可することはできません。
Resolver の場合
衝突を永続的に無視するのではなく、エンジンは 必要なときだけ動的に衝突を許可 します。例えば、溶接接触の瞬間などです。これにより以下が保証されます。
- 溶接点まで 衝突のないモーション
- プロセスが要求する場合のみの 意図的な接触
このアプローチは、想定される接触ごとにカスタムルールを必要とすることなく、より現実的で適応的な動作 を提供します。