Study のエクスポート
エクスポートの準備
表示されているオブジェクト
エクスポート時に表示されている(非表示になっていない)オブジェクトとロボットのみが .zip に含まれます。
不要なエンティティを非表示にすることで、次が可能になります。
- エクスポート処理の高速化
- 非サポートオブジェクトのエクスポートエラーの回避
ロボットが表示されているが関連する Operation を持たない場合、現在のポーズにある 2 つの Target を持つ ダミー Operation がエクスポートされます。これにより Resolver はロボットを正しく配置できます。そうでない場合、ロボットはゼロジョイント位置に戻され、プランニング上の問題を引き起こす可能性があります。
Collision Set の適切な構成は 極めて重要 です。これらは project.yaml の collision_rules に変換され、Resolver のモーションプランニングで使用されます。
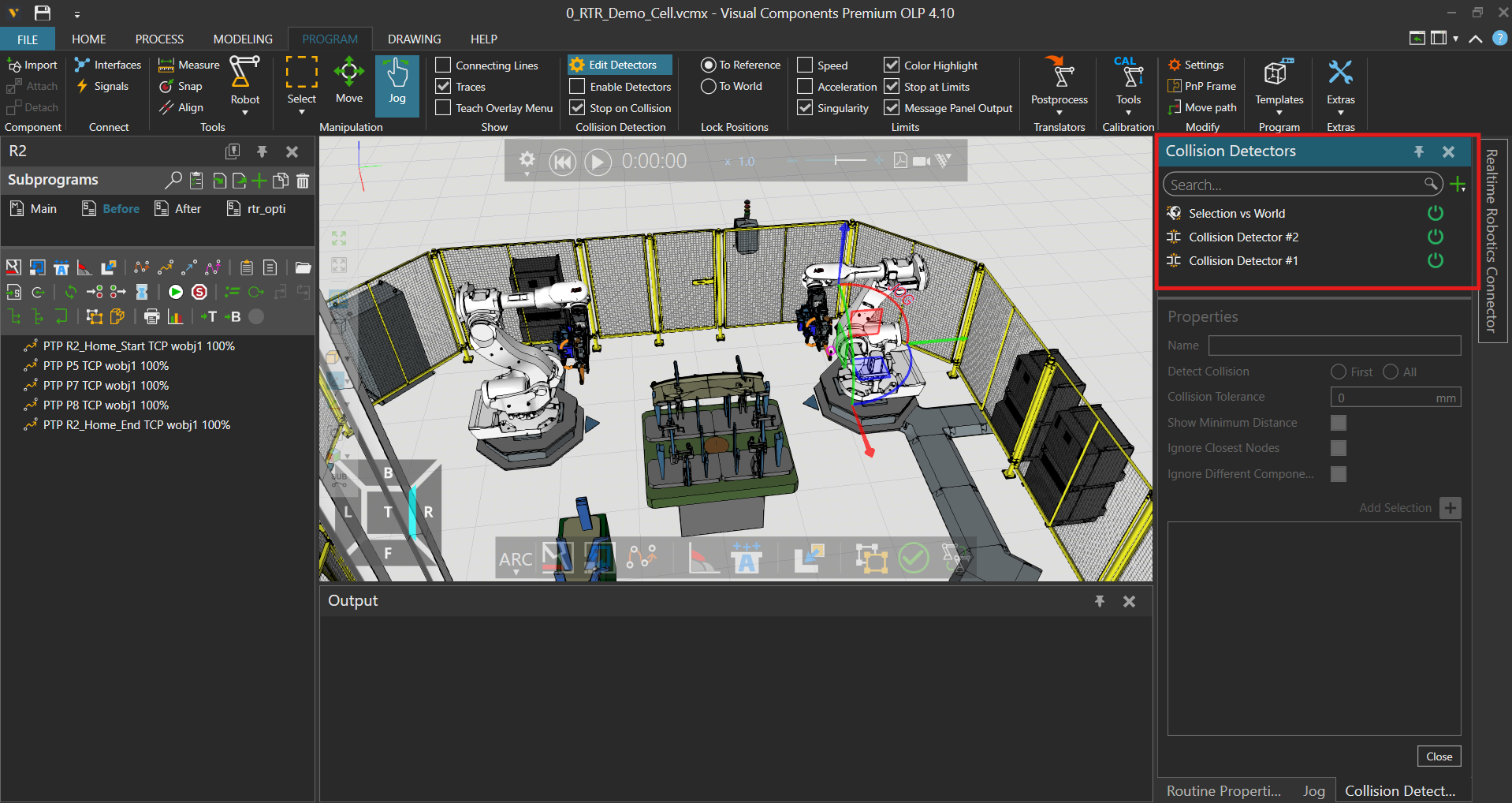
- Visual Components の Collision Tolerance 値は
set_clearanceルールに変換されます。 - これは「ソフト」制約です。Resolver は必要であればこれを違反する場合がありますが、その場合は計算時間が大幅に増加します。
Visual Components では Collision Rule はまだエクスポートされていませんが、今後のリリースでエクスポートされる予定です。
ベストプラクティス:
- Process Point が障害物の近くにある場合は Collision Tolerance < 2 mm を使用してください。
- 孤立したオブジェクトや重要なオブジェクト(例: 柱)には より大きな Clearance(例: 5 mm 以上)を使用してください。
- 控えめに設定してください。許容値が大きすぎるとパスプランニングの複雑さが大幅に増加します。 */}
何がエクスポートされるか
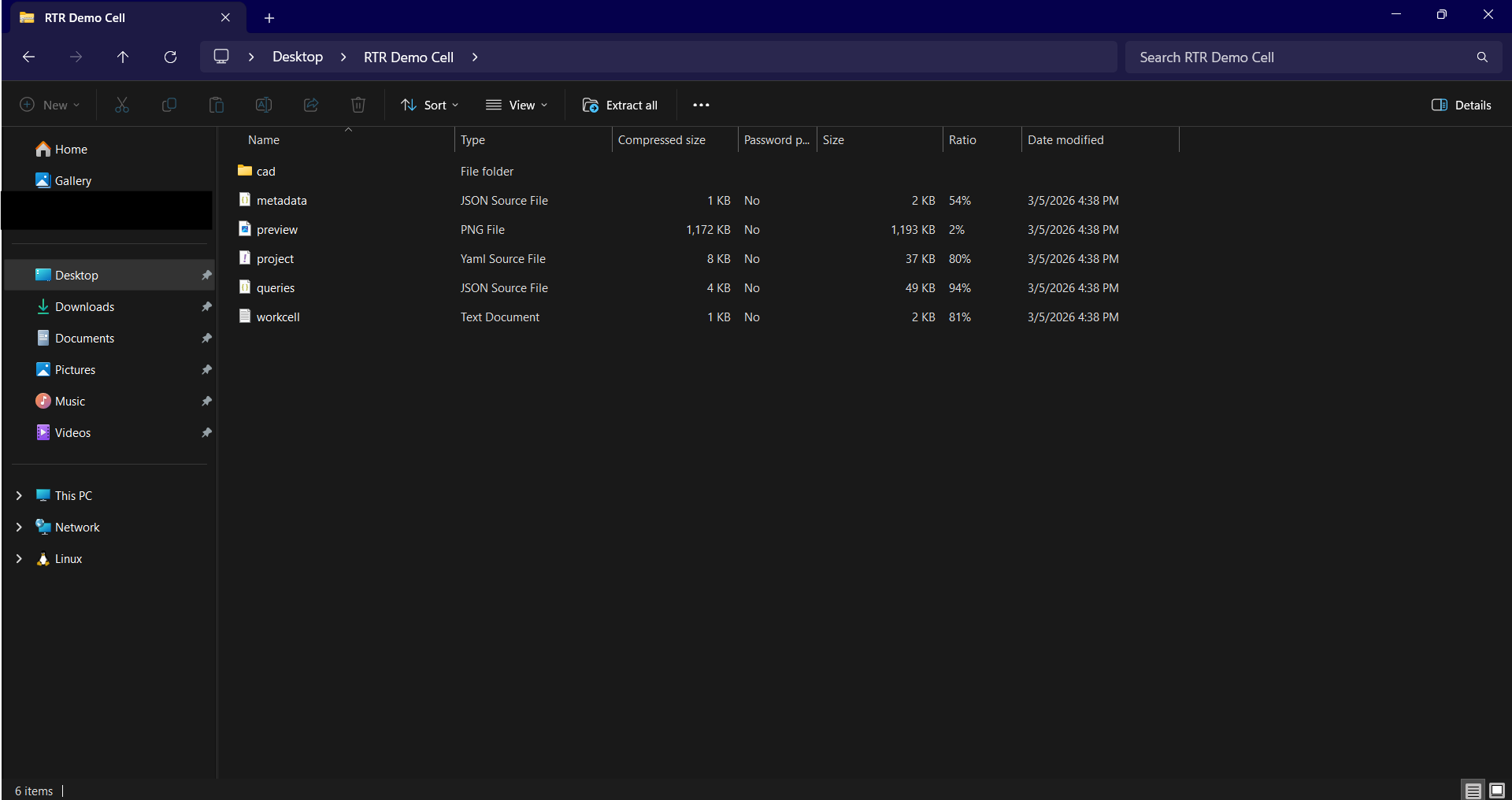
Study がエクスポートされると、Resolver エンジンで使用するための .zip ファイルが生成されます。このアーカイブには次のファイルとフォルダーが含まれます。
| ファイル / フォルダー | 説明 |
|---|---|
project.yaml | エンジンが Workcell をどのように構築するかを定義します。objects および robot_models フォルダー内のすべての項目を参照し、オブジェクトの配置と接続方法を指定します。完全な仕様は将来のリリースで公開される予定です。 |
queries.json | エクスポーターが生成したクエリ — Operations、Target、Precedence 制約 — を含みます。Resolver Cloud では Build Workflow UI から編集可能で、API (beta) 経由では編集可能なプレーンテキストとして表示されます。 |
metadata.json | 将来のバージョンでユーザーエクスペリエンスを向上させるために使用されるパフォーマンスおよび Study データを保存します。 |
workcell.txt | シーン内のロボットのジョイント階層を記述します。 |
logs.json | Study およびエクスポート処理に関するデータをログに記録します。 |
cad/ | ロボットモデルの .mf ファイルを含みます。これらは project.yaml と一緒に使用されて、仮想ロボットモデルおよび環境オブジェクトを構築します。 |
サポートされるアプリケーション
- Spot Welding
- Arc Welding
- Riveting
- Inspection
- Material Handling
- Machine Tending
- Linear Rails
その他のアプリケーションもリクエストに応じてサポート可能です。ユースケースがリストにない場合は、サポートチケットを送信 して RTR Application Engineer にご相談ください。
シーケンスのエクスポート
Connector は ロボットごとに 1 つのシーケンス(Operation) をエクスポートし、すべてのシーケンスは 並列に 実行されます。エクスポートするシーケンスを選択する際には、次を確認してください。
- すべての サブシーケンス呼び出しまたは追加のシーケンス がエクスポートされる メインシーケンス内に 含まれている。
- 必要な Target のみ(例: Process Point や必須の Via)が含まれている。
- エクスポートの前に ⏮️ Reset を実行する — すべてのロボットとオブジェクトが開始位置にある必要があります。
- Target の順序は 結果で 保持されます。
ステップバイステップ: Visual Components からのエクスポート
- Visual Components のメニューで Realtime Robotics Connector に移動します。プロジェクトを Resolver にエクスポートする方法は 2 つあります — Online と Offline です。
- Online Export — シミュレーション PC にインターネットアクセスがある場合に使用します。
- Offline Export — シミュレーション PC にインターネットアクセスが ない 場合に使用します。プロジェクトはローカルに保存され、後で Resolver Cloud に転送されます。
Online Export
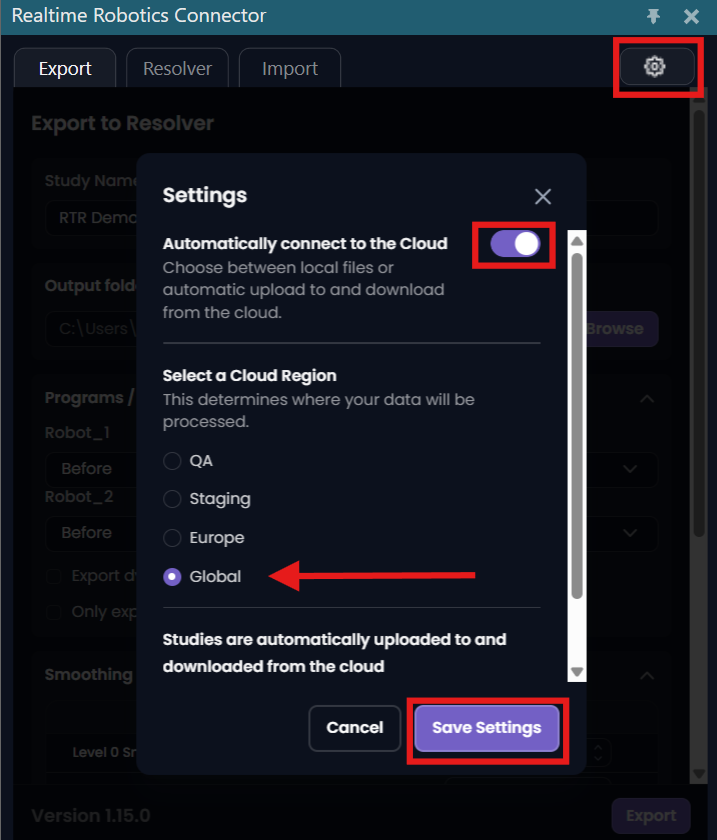
a. Realtime Robotics Connector タブで ギア アイコンをクリックし Settings を開きます。Automatically connect to the Cloud がオンになっていることを確認し、地域を選択します。ヨーロッパにいる場合は Europe を、それ以外の場合は Global を選択します。Save Settings をクリックします。
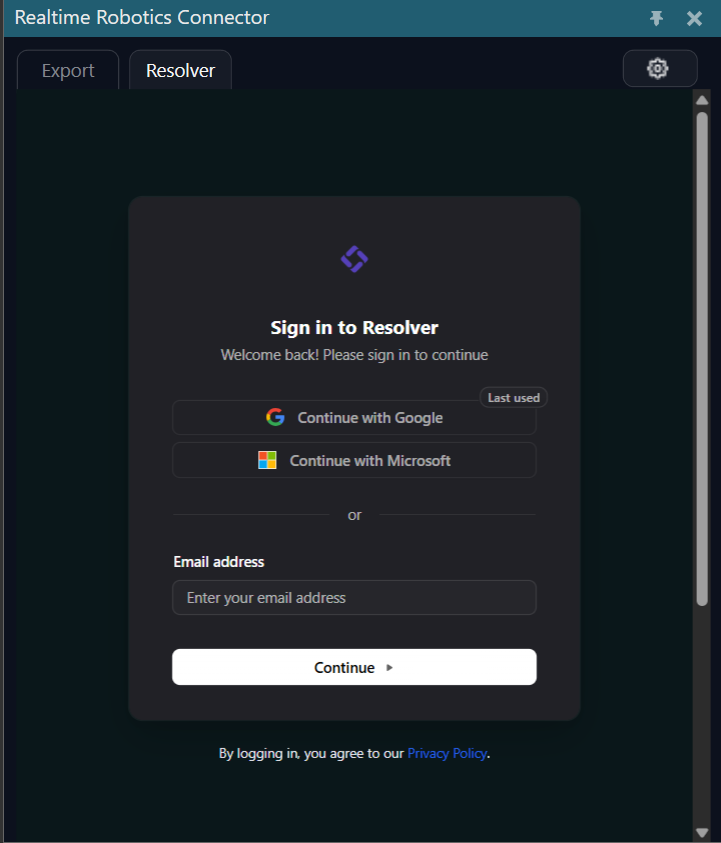
b. Resolver タブに移動し、そこで Resolver の認証情報を入力する必要があります。
c. 宛先フォルダー/パスを指定し、各ロボットに対して Resolver に最適化してもらうシーケンスを選択して Export をクリックします。
Offline Export
Settings パネルで Automatically Connect to the Cloud がオフになっていることを確認します。次に Export → Subprograms to export に移動し、各ロボットのシーケンスを選択します。
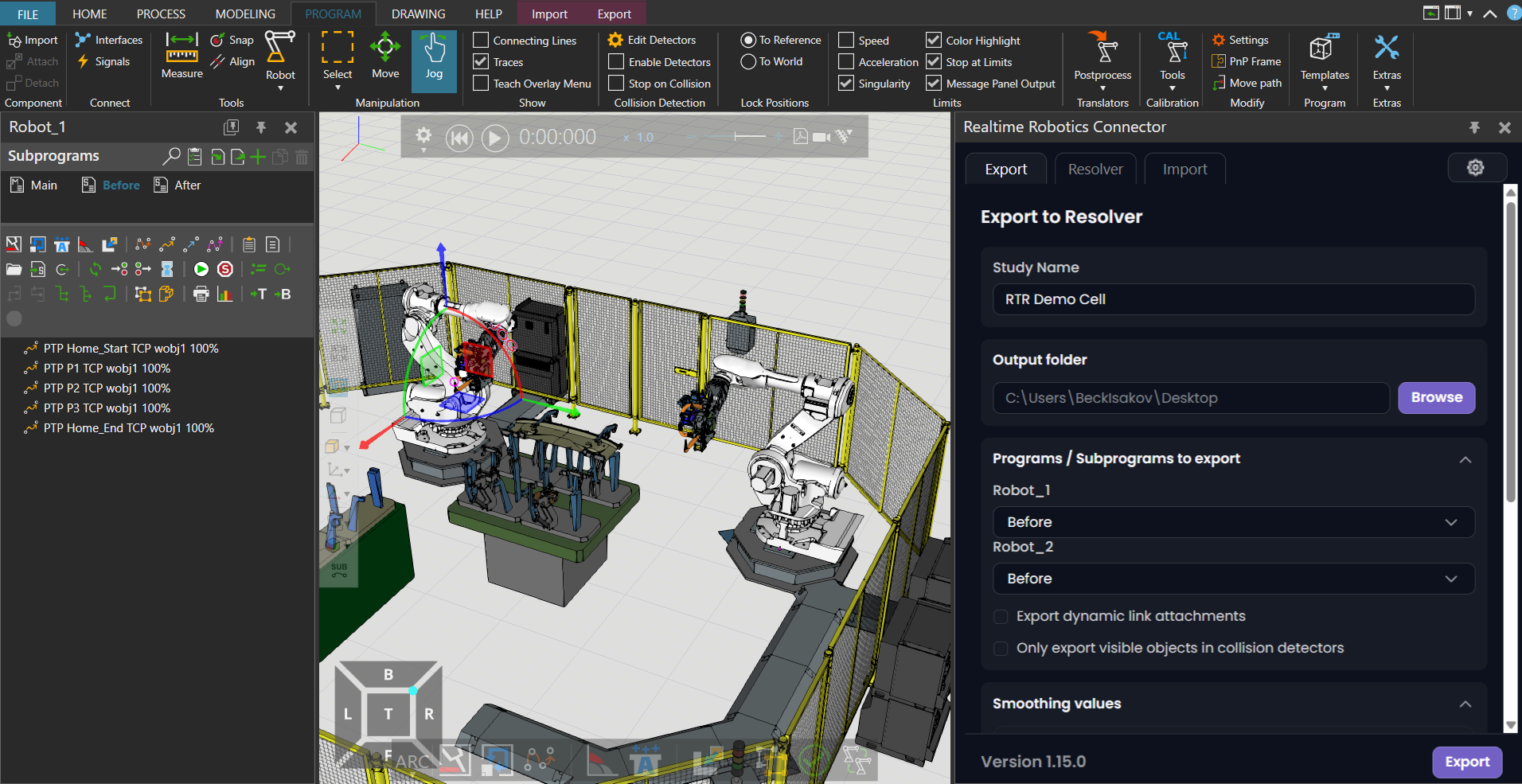
-
zip 形式のプロジェクトをローカルに保存する出力フォルダーパスを選択します。
- Study Name フィールドに 名前 を入力します(これは
.zipのファイル名として使用されます)。 - 各ロボットのシーケンスを選択します。
- Study Name フィールドに 名前 を入力します(これは
-
Export をクリックします。
- Connector の Output または Status パネルで進行状況を監視します。エクスポート時間はセルのサイズによって異なります。
- 成功すると、次のようなメッセージが表示されます。
Created Zip file :\Path\To\Your\File.zip
エクスポートが完了したら、.zip ファイルを Resolver Cloud にアップロードして処理を開始してください。