設定
Studies
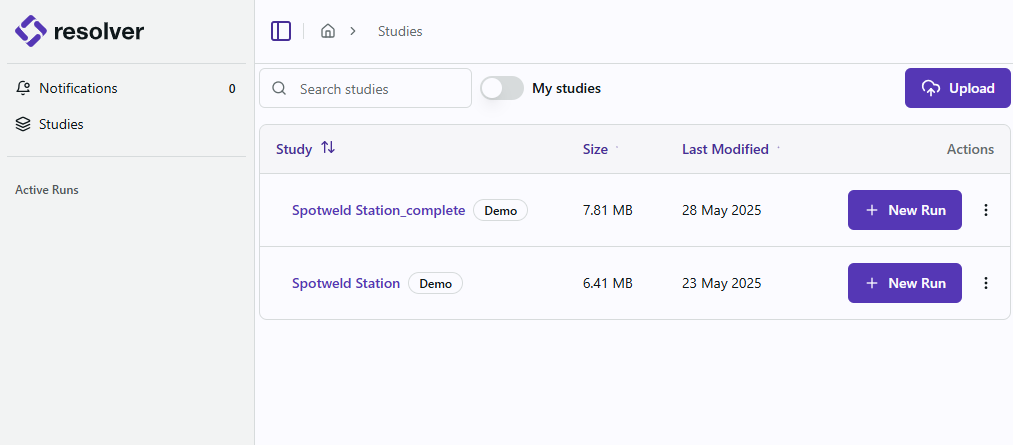
サインインすると Studies ページに移動します。ここには、お客様の会社がアップロードしたすべての Study が表示されます。
Run の設定
-
Run を開始したい Study に対して、
+ New Runボタンをクリックします。 -
設定選択ページに移動します。このページが表示されない場合は、標準の Build オプションがすでに選択されているため、次のステップに進んでください。
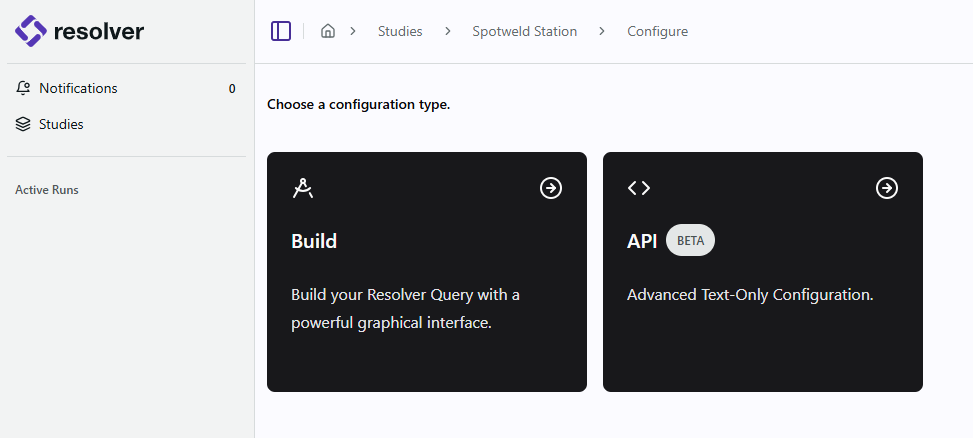
注: API オプションは、queries.json ファイルの理解を必要とする高度なワークフローであり、UI はありません。このオプションは、UI がまだないベータ機能を有効化する手段として提供されているだけです。ここから先は標準の Build ワークフローに従って進めます。API ワークフローを使用する場合は、担当の RTR Applications Engineer にお問い合わせください。
-
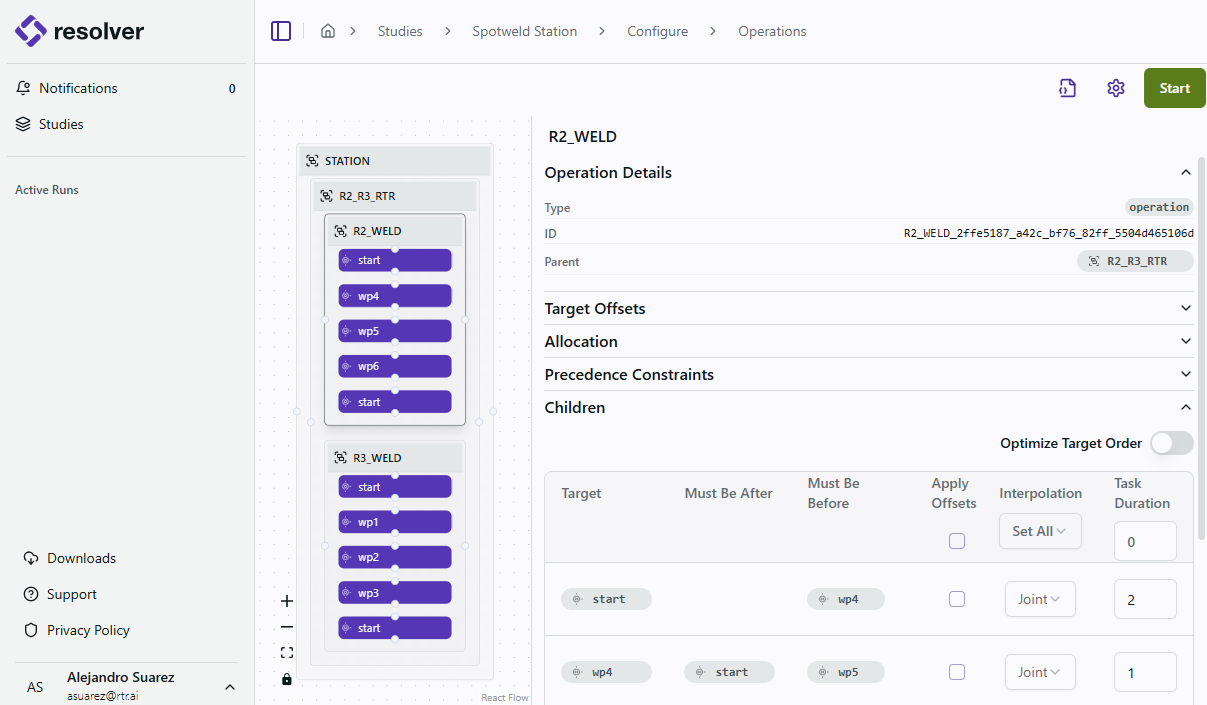
Connector 経由でエクスポートされたシーケンスの一覧が表示されます。このページには、ユーザーが選択できる追加の設定項目がいくつかあります。
Target Offsets
Target Offsets を追加し、外部軸の値と共に X、Y、Z のオフセットを指定して、任意の数のポイント、あるいはすべてのポイントに適用できます。Resolver はパスプランニングおよび interlock の生成時に、これらのオフセットを approach および depart ポイントとして使用します。
Allocation
同じタスクを複数のロボットで実行できるマルチロボットアプリケーションでは、どのロボットがその操作で考慮されるかを Resolver に指定してください。Resolver は選択されたすべてのロボットを対象に、Reachability、パス、interlock を評価し、最適な Target からロボットへの割り当てを決定します。この機能を使用すると、考えられるソリューションの数が増えるため、Resolver の実行時間を長めに取ることをお勧めします。
Precedence Constraints
選択された操作の後に開始するか、選択された操作の前に完了している必要があるアクションまたは操作を表示します。Precedence Constraints は、シミュレーションツールからの情報に基づいて Connector によって生成されます。以下を参照してください。
Children
親または複合操作が選択されている場合、そのすべての子操作が一覧表示されます。Target を持つ操作が選択されている場合、その操作に関連付けられたすべての Target のリストが表示されます。
Interpolation
Interpolation の列は、EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... がプロセスポイントへ、およびプロセスポイントからのモーションパスをどのように補間するかを制御します。以下のオプションがあります。
-
Joint: ロボットは、Target に到達するために Joint 空間上の最短パスに沿って各 Joint を動かします。これは最速の補間モードでありデフォルトです。TCP が直線を辿らないため Joint の動作は人間にとって予測しづらく見えることがありますが、サイクルタイムのパフォーマンスを最大化します。
-
Linear: ロボットは、ウェイポイント間で TCP を直交空間上の直線に沿って動かします。Linear は Joint より遅いですが、予測可能で人間に読みやすいパスを生成するため、立ち上げ時のタッチアップが容易になります。Joint の制約や特異点検出のため生成に失敗した Linear 指定の動作については、Resolver は Joint 補間にフォールバックします。
-
Hybrid: プロセスポイントへの近さに応じて Joint と Linear 補間をインテリジェントに切り替えます。このオプションは Resolver の組織ごとの Feature flag で有効化されます。表示されるはずが見当たらない場合は、RTR Support までお問い合わせください。
-
ハイブリッド補間とは
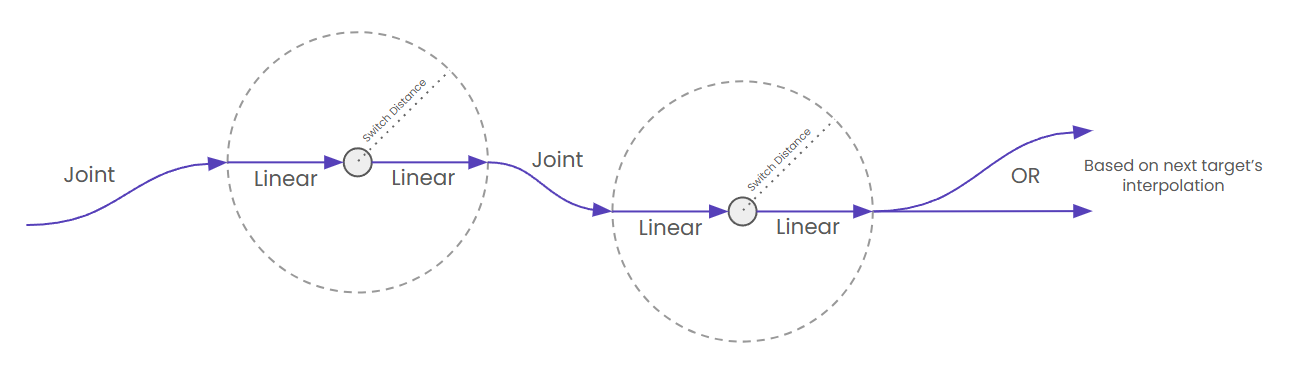
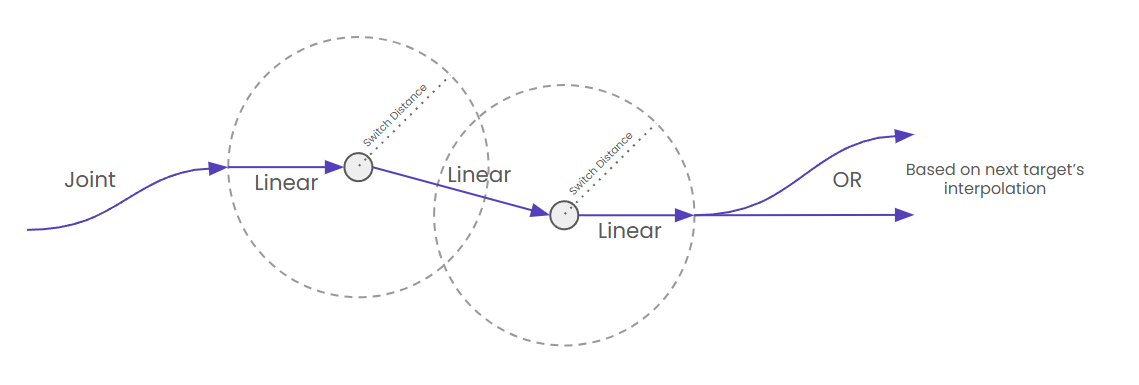
ハイブリッド補間は、Target のウェイポイントへの近さに応じて Joint と Linear 補間をインテリジェントに切り替えるトラジェクトリプランニングモードです。遠距離では Joint 動作の高速性を、プロセスポイント付近では Linear 動作の制御性と人間にとっての扱いやすさを組み合わせます。
EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... は、パスがプロセスポイント周辺のゾーンの外側で生成されるか内側で生成されるかに応じて、補間のタイプを切り替えます。
- スイッチゾーンの外側: 最高のサイクルタイム性能を得るために、最速の Joint 補間を使用します。
- スイッチゾーンの内側: 立ち上げ時のタッチアップが容易な、制御された動作のために Linear 補間に切り替えます。
モード間の遷移タイミングを決定する距離しきい値は Switch Distance と呼ばれます。
注記Joint の制約や特異点検出のため生成に失敗した Linear 指定の動作については、Resolver は Joint 補間にフォールバックします。これはハイブリッドの指定にかかわらず、計画されたすべての Linear 動作に当てはまります。
-
スポット溶接向けのハイブリッド補間
ハイブリッド補間の動作は、スポット溶接点間の間隔に応じて変化します。
-
重ならない Switch Distance: プロセスポイントの間隔が十分に離れ、Switch Distance ゾーンが重ならない場合、その方が速いパスとなるなら、システムはトランジット区間に対して Joint 補間を使用します。これにより、プロセスポイント間の長い移動区間において Joint 補間の速度メリットを活用できます。
-
重なり合う Switch Distance: プロセスポイントが近接し、Switch Distance のバブルが重なり合う場合、補間は via 動作全体で Linear のままとなります。これにより、近接するプロセスポイント間でも一貫した精密な動作が保たれ、パス全体を通じて Linear 補間の利点を維持します。
-
-
ハイブリッドパラメータ
Hybrid オプションを選択すると、以下のパラメータを調整できます。
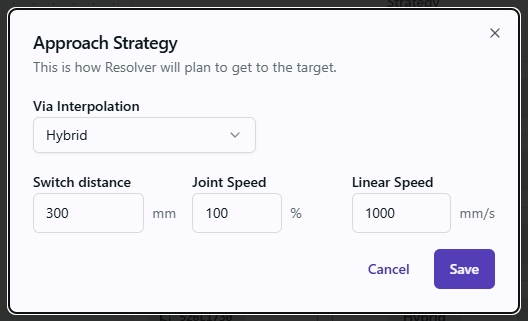
- Switch Distance: プロセスポイント周辺のゾーンの半径で、EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... が高速な Joint 動作から速度制限のある Linear 動作に切り替える境界となります。
- Joint Speed: スイッチゾーン外で生成される via に使用される最大速度です。100% のままにしておくことを強くお勧めします。
- Linear Speed: スイッチゾーン内で生成される via に使用される最大速度です。
-
Optimize Target Order
エンジンは、Target の並べ替えを許可することでシーケンスを最適化します。ただし、最初 および 最後 の Target は必要な開始点・終了点として固定されます。エンジンが別の順序の方がサイクルタイムを改善すると判断した場合、それ以外のすべての Target は並べ替えられる可能性があります。
Task Duration
Task の時間は、各 Target での「待ち」時間に相当します。スポット溶接の場合、これは 1 回のスポット溶接に要する時間とします。必要に応じて、ユーザーはシーケンス内の任意の Target に対して Task Duration の値を手動で調整できます。
-
-
設定を変更するには、ページ右上の ⚙ View Query Settings を選択します。以下のクエリ設定を利用できます。
Motion Settings
Avoid Other Robots' Home Positions
この設定は、あるロボットに対して生成されるモーションパスが、他のロボットの最初および最後の Target(「Home」Target)と交差しないことを保証します。ただし、このルールを維持する実行可能なパスが存在しない場合、結果にはルール違反や衝突が含まれる、もしくはソリューションが見つからない場合があります。したがって、このオプションを有効にする場合は、Home Target が他のロボットのモーションパスから十分に離れていることを必ず確認してください。
Enable Smoothing
生成される via ポイントに対して、ゼロでない smoothing 値を使用できるようにするにはこの設定を利用します。有効にすると、エンジンは queries.json ファイルの
smoothing_tablesセクションにある値のいずれかを使用しようとします。エンジンは via の数と smoothing 値を最適化し、最良のサイクルタイムを得ます。シーケンスリスト内の Target(プロセスポイント)にはこれらの smoothing 値は適用されません。End Conditions
Convergence
この 2 つの設定により、エンジンがソリューションに収束したとみなされるタイミングを設定できます。これらの値は、エンジンが現在のソリューションを改善するために十分な時間を確保しつつ、無制限には実行しないようにする必要があります。本質的には、Run 開始時に動き出す「タイマー」が存在します。このタイマーの動作は以下の設定で調整できます。
- Improvement Threshold (s): 進捗ありとみなすために必要なサイクルタイムの最小改善量です。このしきい値を超えると、「タイマー」はゼロにリセットされ、再び動き始めます。
- Time Threshold (s): 「タイマー」の上限です。この値に達すると、Run はソリューションに収束したとみなされ、自動的に完了します。
Elapsed Time
- Time Threshold (s): Convergence タイマーに関係なく、Run が継続できる最大時間です。
-
設定が完了したら、画面右上の Start ボタンを選択します。この時点でライセンスがチェックアウトされ、クラウド上にサーバがプロビジョニングされます。