実行
Run
RunAn instance of a study and query computed by the Engine and generates motion paths, interlocks, and/or robot task allocation and ordering. Multiple runs can be executed in parallel by using multiple a... が開始されると、実行環境の準備が行われます。最初にクラウド上にサーバが作成され、プロビジョニングされます。
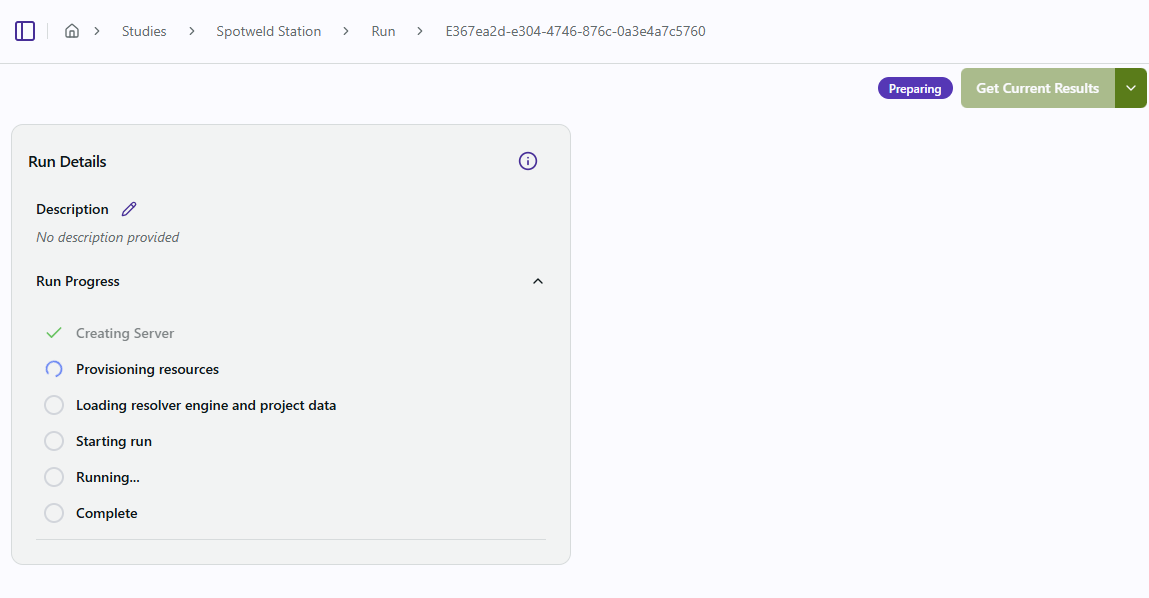
プロビジョニングが完了すると、エンジン内で Reachability チェックが実行され、最初の衝突のないソリューションが生成されます。エンジンはその後、数十万もの可能性を繰り返し検討し、サイクルタイムとパスの品質を向上させていきます。
Run の任意のタイミングで、Get Current Results、Accept Results & Stop、Stop Run を選択できます。

Get Current Results
Get Current Results は、EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... を停止せずに最新の結果をダウンロードします。中間結果をシミュレーションソフトウェアにインポートして評価できます。
Accept Results & Stop
ドロップダウンメニューから Accept Results & Stop を選択すると、Run が停止され、最新の結果を取得できます。Run を再開することはできません。結果を取得するのに数秒かかる場合があります。結果の準備が完了すると、画面の右下にポップアップメッセージが表示されます。
Stop Run
ドロップダウンメニューから Stop Run を選択すると、結果を生成せずに Run を停止します。結果が生成されないため、ダウンロードすることはできません。
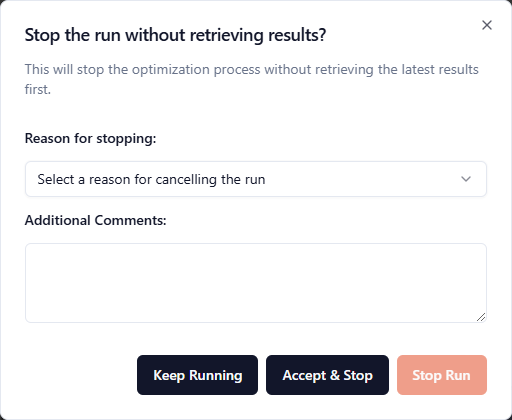
Run を停止する理由を選択し、製品の改善に役立つ追加フィードバックを記入してください。
結果
Reachability
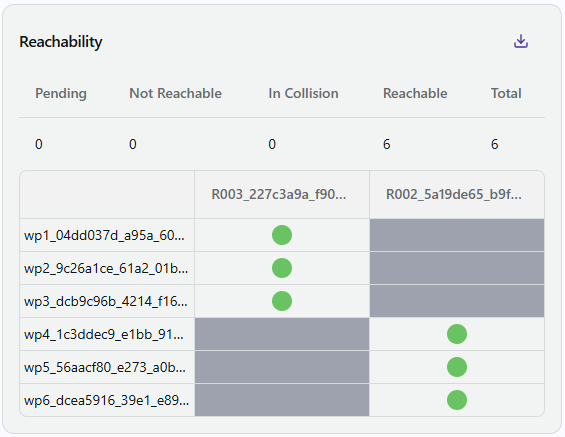
Resolver は実際のモーションパスを生成することで、ロボットが割り当てられた Target に到達できるかを確認します。数分以内に、どのロボットがどの割り当てポイントに到達できるかを詳細に示すテーブルが生成されます。このテーブルは CSV 形式でダウンロードして、計画やエンジニアリングのプロセスで活用できます。
テーブルに表示される各状態は以下の通りです。
-
Pending (⌛): エンジンが Reachability を計算中です。
-
Not Reachable (赤): Target に到達できません。
-
In Collision (黄): Target に到達可能ですが、衝突を伴います。
-
Reachable (緑): 衝突なしで Target に到達可能です。
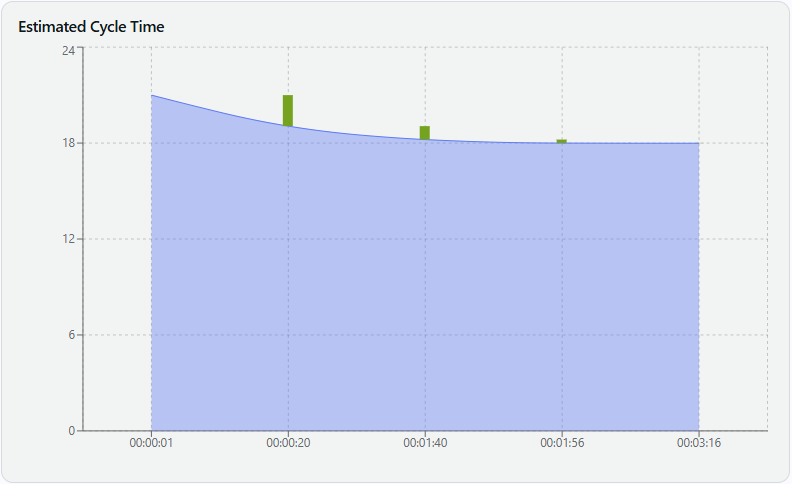
サイクルタイムの見積もり
最新の結果の合計サイクルタイム見積もりを示すグラフが、エンジンがイテレーションして最も低いサイクルタイムのソリューションを見つける間、更新されていきます。現在のイテレーションのサイクルタイムは y 軸に、Run の経過時間は x 軸に表示されます。
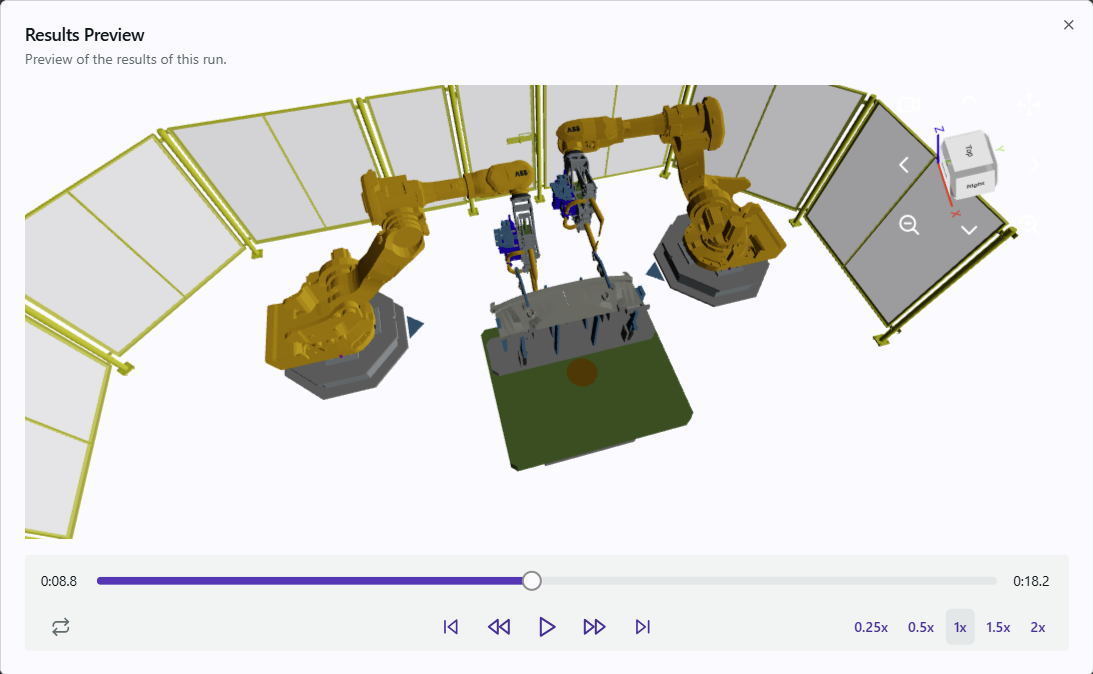
結果プレビュー
結果プレビューを使うと、Run が完了する前に進行状況を確認できます。Get Current Results をクリックして最新データを読み込み、結果プレビューのウィンドウを展開すると、シミュレーションツールにインポートし直すことなく、生成されたパスと interlock のシミュレーションを見ることができます。なお、プレビューのシーンのジオメトリには、Collision Set の一部として定義されているオブジェクトのみが表示されます。オブジェクトがシーンに表示されず、Collision Set で考慮したい場合は、Resolver にエクスポートする前に、シミュレーションツールの Collision Set にそのオブジェクトを定義する必要があります。