Process Simulate Cell Optimization
Downloading and Running the Demo Cell with Resolver
In this tutorial, we'll guide you on how to download and run the demo cell using Resolver.
By the end of this tutorial, you'll be able to create collision-free robot motion paths with interlock signals that meet your cycle time requirements.
Download the Demo Cell
Step 1: Log in to your Resolver Cloud account, then click the Download tab on the left-hand side.
Step 2: Download the RTR Cell Demo, which includes a pre-built setup with spot welding robots.

Load the Cell in Process Simulate
Step 1: Open the downloaded cell in Process Simulate. You'll see two robots, each with an operation containing three weld points and no wire points. Ensure the collision sets are properly defined.
Step 2: Run the operation. You'll notice collisions between the two robots. To resolve this, open the Resolver plugin in Process Simulate.

Export to Resolver
Step 1: Enter a name for your export and select the operation(s) you wish to optimize.
If you're using RCS, be sure to check the Calibrate Robot Dynamics box.
If your setup includes robot cables, also check Export Dynamic Link Attachments.
Step 2: Adjust the smoothing values as needed, then click Export.
Since we’re using RCS, the robot’s dynamic parameters will also be exported.
The study will automatically upload to Resolver.
Step 3: Enter the name of your export.
Step 4: Select the operation you want to export.

Step 5: Check the Calibrate Robot Dynamics box if you're using RCS. If your setup includes robot cables, also check Export Dynamic Link Attachments.

Step 8: Set the smoothing values as needed, then press Export.
Configure Your Study in Resolver
Step 1: Click Build to begin configuring the optimization.
You’ll see your operations appear on the canvas — for example, operations from R2 and R3.
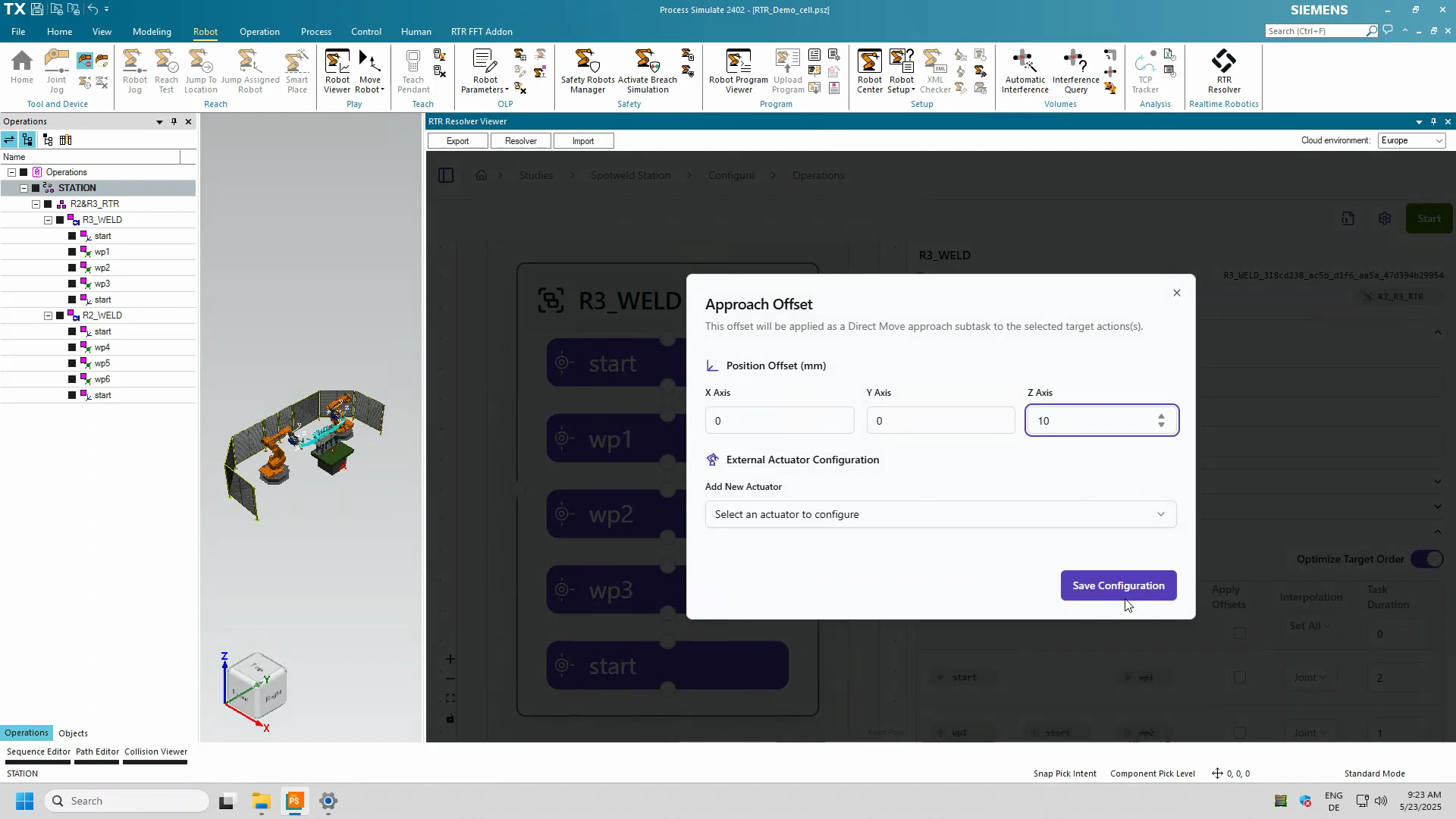
For Robot 3, target order optimization is available if allowed by the process.
You can adjust task durations and configure approach/depart offsets (e.g., 10 mm).
Replicate the same for Robot 2, and configure the query settings and end conditions.
Once ready, press Start to begin the optimization.

Step 2: Set offsets for the approach and depart positions. All weld points will use a 10-millimeter approach offset and a 10-millimeter depart offset.
Optimization Process
Once ready, press Start to begin the optimization. Resolver will now start a cloud server to process your setup. You can continue working on your process in the background.
The Reachability report is available here and can be downloaded as CSV.

As iterations progress, you’ll notice the estimated cycle time decrease.
You can preview motion results in real time to capture current progress.

To view current progress, click Get Current Results — the study will continue running in the background. When satisfied with the results, click Stop and Accept Results.

Finalize and Import Results
Step 1: When satisfied with the results, click Stop and Accept Results.
Step 2: To download, click Download Results.
In the dialog box, select your preferred result based on interlocks and cycle time, then click Import.
The system will automatically switch to the import window.

Step 3: Ensure Auto-Tune Smoothing Values is checked — this helps Resolver apply optimal zone data to the paths.
Step 4: Make sure RCS remains enabled.
Step 5: Click Import to bring in the results.
When prompted, confirm the smoothing process by clicking Yes, and allow time for completion.

Review the Optimized Operation
Once complete, click OK.
You’ll now see a new operation under the Operations Tree, with:
-
Optimized weld point order,
-
Added via points,
-
And collision-free paths.

Play the optimized operation to observe both robots executing without collision.
You’ll also find detailed interlock data embedded in the path information.
You now have optimized, collision-free robot motion paths with interlock signals that meet your cycle time requirements. What took days can now be done in minutes!
Thank you for watching, and happy path planning with Resolver!