Collision Rules
Exporting Collision Detectors
Gemini and the EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr... both support collision detection, but they follow different default behaviors:
| Behavior | Gemini | Resolver Engine |
|---|---|---|
| Default collision checking | Off (no collisions) unless explicitly enabled | On (full collision detection by default) |
| User control | Must define what to check/not check | Can define what not to check |
| Collision tolerance | Used as a proximity warning threshold | Treated as a “soft” constraint during planning |
| Object visibility | All defined objects considered unless excluded | All defined objects considered unless excluded |
⚠️ As of now, even If no collision sets are enabled in Gemini Collision Viewer at export time, Resolver will use its own defaults (full collision checking).
Collision rules are not currently exported from Gemini, but will be in upcoming releases.
In the upcoming releases, If collision sets are defined in Gemini, they will be exported and translated to equivalent Resolver configuration so that Gemini configured behavior is respected.
Understanding Collision Rules
Collision rules define how the system should behave when objects come into contact — whether to avoid, allow, or tolerate collisions under specific conditions.
Gemini: Default Behavior
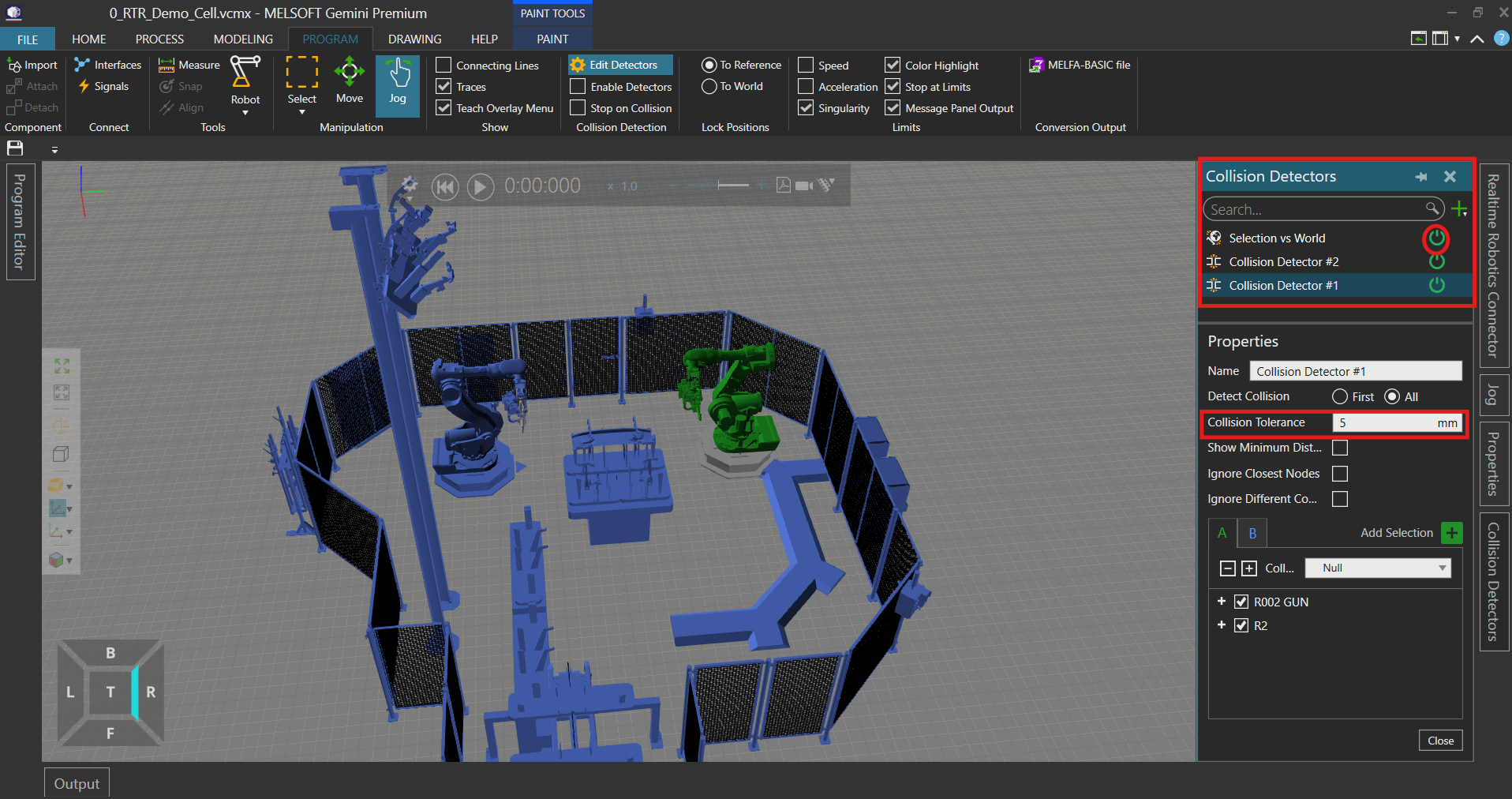
By default, Gemini does not check for collisions unless a collision set is enabled.
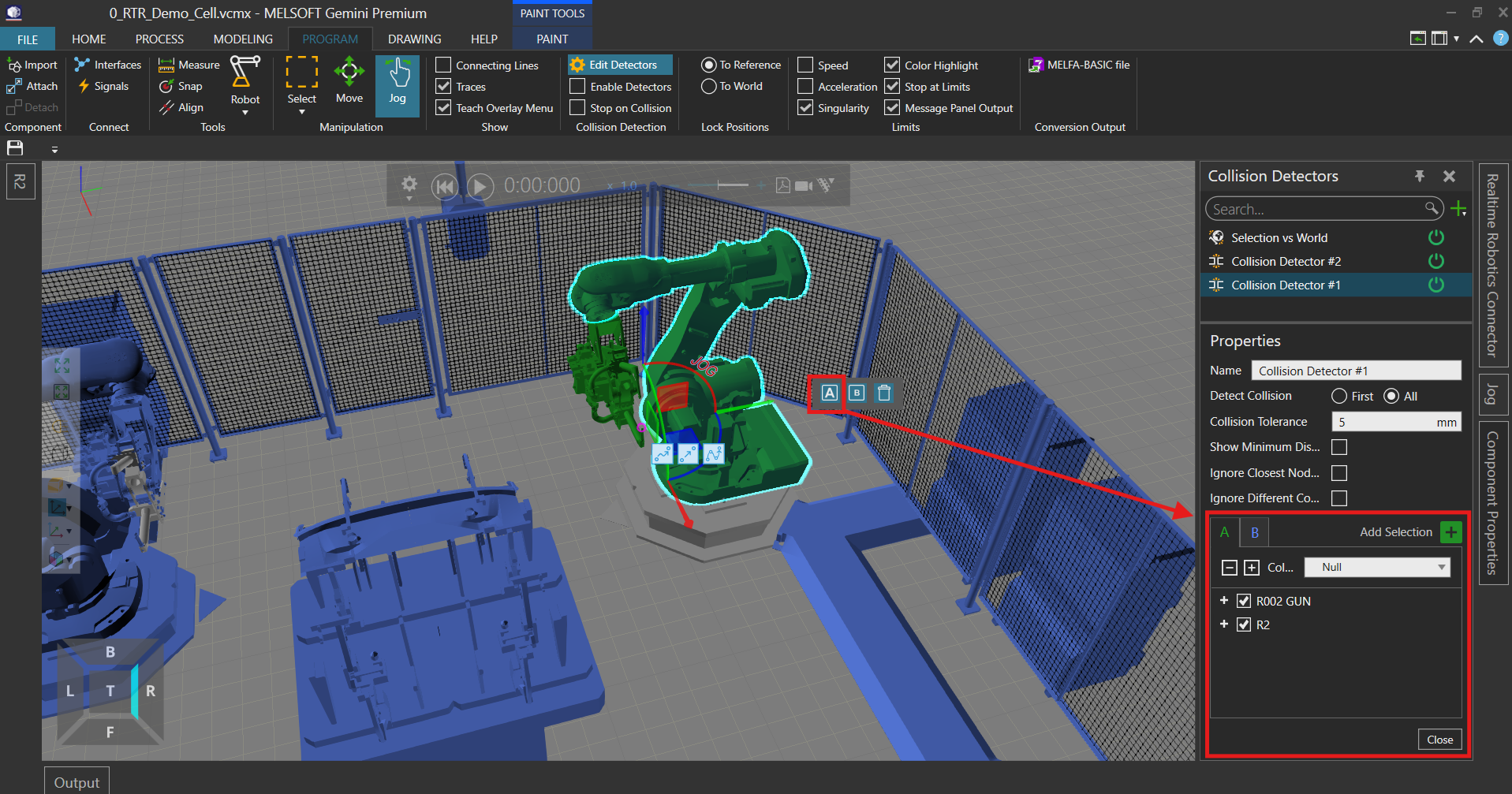
- Collision detection only occurs between object pairs specified in the A and B columns.
- Users must manually configure these sets.
- Each set may include a Collision Tolerance, serving as a warning threshold for proximity.
🔗 Learn more from the Gemini Academy
RTR Engine: Default Behavior
RTR's motion planning engine defaults to checking all collisions, including:
- Robot-to-Robot
- Robot-to-World
- Robot-to-Environment
Rather than requiring users to define what to check, Resolver allows you to disable specific checks when needed.
⚠️ When converting from Gemini to Resolver, the exporter ensures that all defined Gemini collision sets are respected and mapped accordingly.
Collision vs. Clearance
How the RTR Engine Handles Clearances
In Resolver, collisions and clearances are unified concepts:
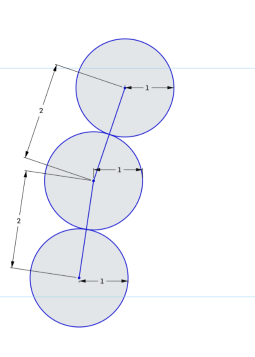
- A collision is simply defined as a 0mm clearance.
- Default global clearance is 1mm, checked at most every 2mm along a motion segment.
Key Behavior:
- The engine may violate a clearance or collision rule if no alternate path is found.
- Paths with violations are penalized heavily in cost, but will still be selected as a last resort.
- This allows flexibility without forcing the user to manually define every expected collision.
Practical Example: Weld Gun Tip Contact
How Expected Collisions Are Handled Differently
In Gemini
Expected collisions (like between a weld tip and a part) are handled by ignoring collisions using Collision Detectors.
In Resolver
Instead of permanently ignoring collisions, the system dynamically allows collisions only when necessary — like at the moment of weld contact. This ensures:
- Collision-free motion up to the weld point
- Intentional contact only when needed
This approach provides a more realistic, adaptive behavior, without requiring custom rules for every expected contact.