Run
Run
Once a RunAn instance of a study and query computed by the Engine and generates motion paths, interlocks, and/or robot task allocation and ordering. Multiple runs can be executed in parallel by using multiple a... is started, the run environment will be prepared. This starts by creating and provisioning a server in the cloud.
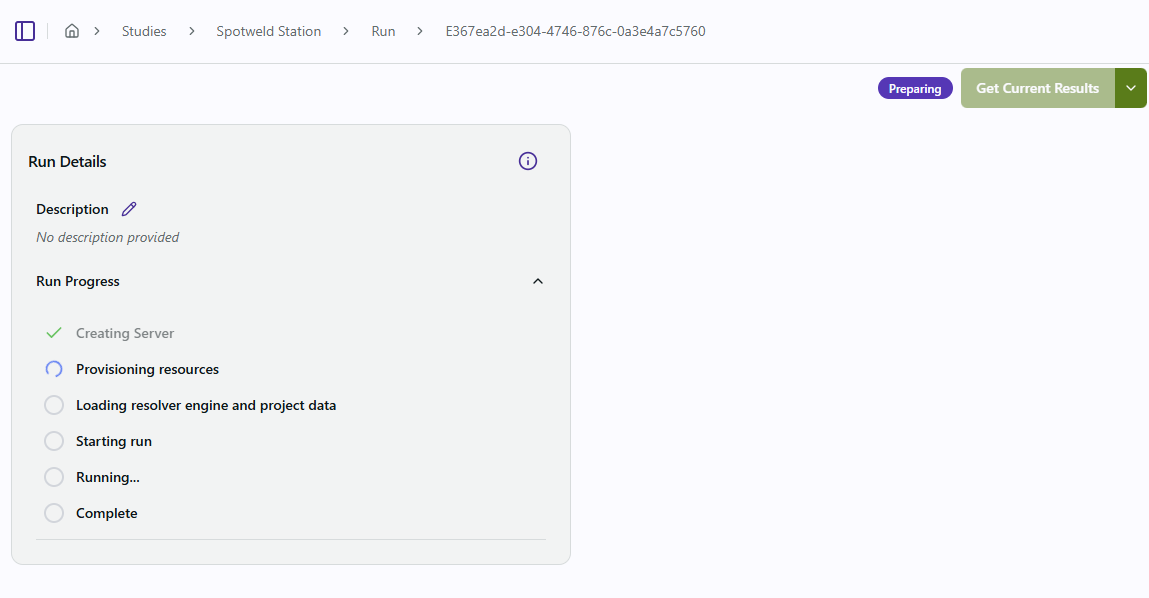
Following the provisioning process, reachability checks will happen in the engine and an initial collision-free solution will be produced. The engine will continue iterating through hundreds of thousands of possibilities to improve cycle time and path quality.
At any point in the run, the user can Get Current Results, Accept Results & Stop or Stop Run.

Get Current Results
Get Current Results will download the latest results without stopping the EngineThe engine (or Resolver Engine) refers to the core algorithm that is running in Resolver that takes a study and a query; generates collision free motion paths, interlocks, and task allocations; and pr.... You can import the intermediate results into the simulation software to evaluate them.
Accept Results & Stop
From the drop down menu, select Accept Results & Stop to stop the run and get the latest results. You will not be able to resume the run. The process of retrieving the results can take a few seconds. A popup message will appear in the lower right corner of the screen when the results are ready.
Stop Run
From the drop down menu, select Stop Run to stop the run without generating any results. Since no results are generated, you will not be able to download any results.
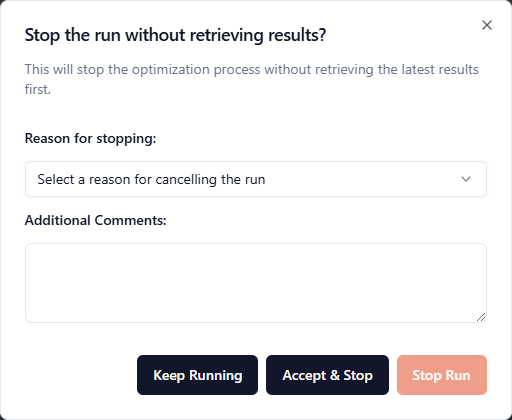
Please select the reason for stopping the run and provide any additional feedback that will allow us to improve the product.
Results
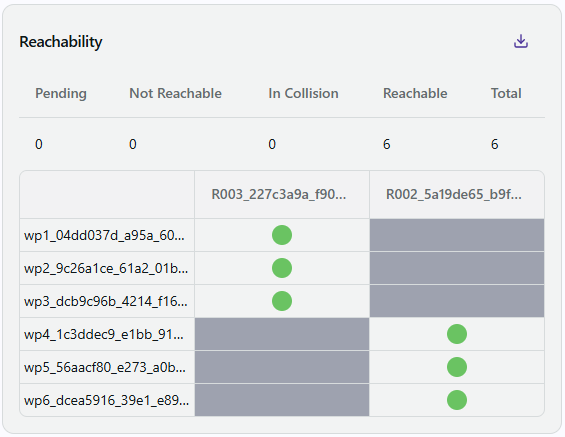
Reachability
Resolver will check if robots are able to reach their assigned targets by generating actual motion paths. Within minutes, a table will be generated detailing which robots can reach which assigned points. The table can be downloaded in CSV format for you to use elsewhere in your planning and engineering processes.
The different states displayed on the table are:
-
Pending (⌛): the Engine is calculating reachability.
-
Not Reachable (red): the target is not reachable.
-
In Collision (yellow): the target is reachable but only through a collision.
-
Reachable (green): the target is reachable without collision.
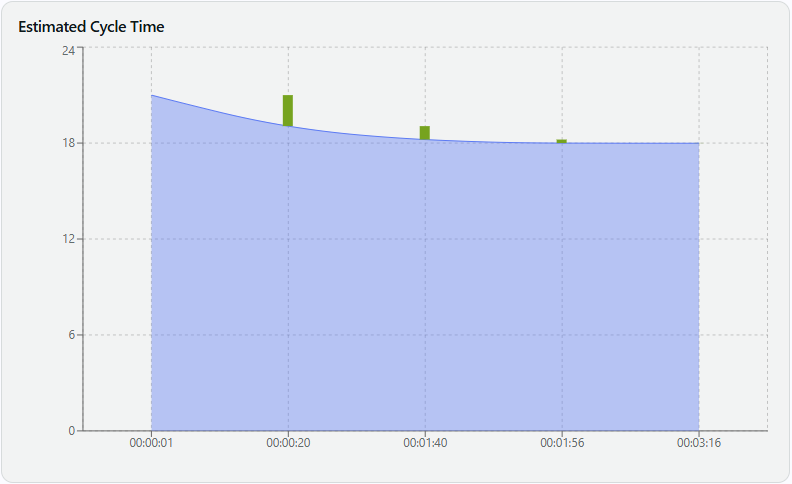
Cycle Time Estimate
A graph showing the total cycle time estimate for the latest results is updated while the Engine is iterating and finding solutions with the lowest cycle time. The current iteration's cycle time is on the y-axis and the run's elapsed time on the x-axis.
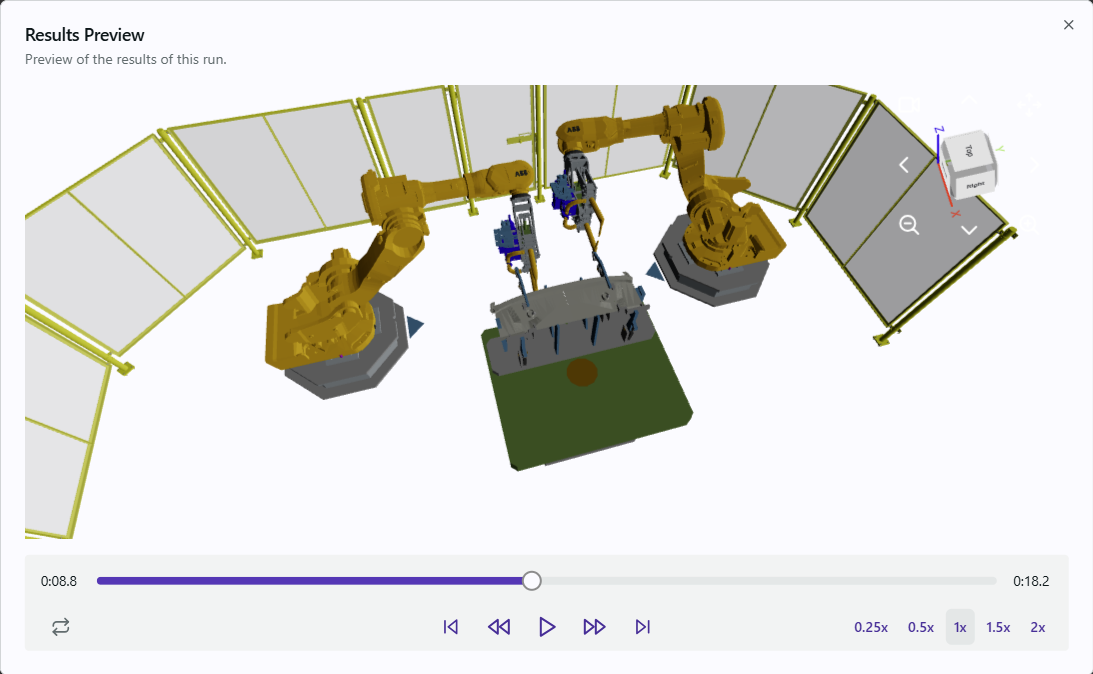
Results Preview
Results Preview allows you to see how the run is going before it completes. Click on Get Current Results to load the latest data, then expand the Results Preview window and watch a simulation of the generated paths and interlocks without having to import back to the simulation tool. Please note, only objects that are defined as part of the collision set will appear in the geometry of the scene in the preview. If an object does not appear in the scene and you would like it to be considered in the collision set, you need to define it in the collision sets of your simulation tool prior to export to Resolver.